


具身智能数据处理与模型训练框架

LiGuangning
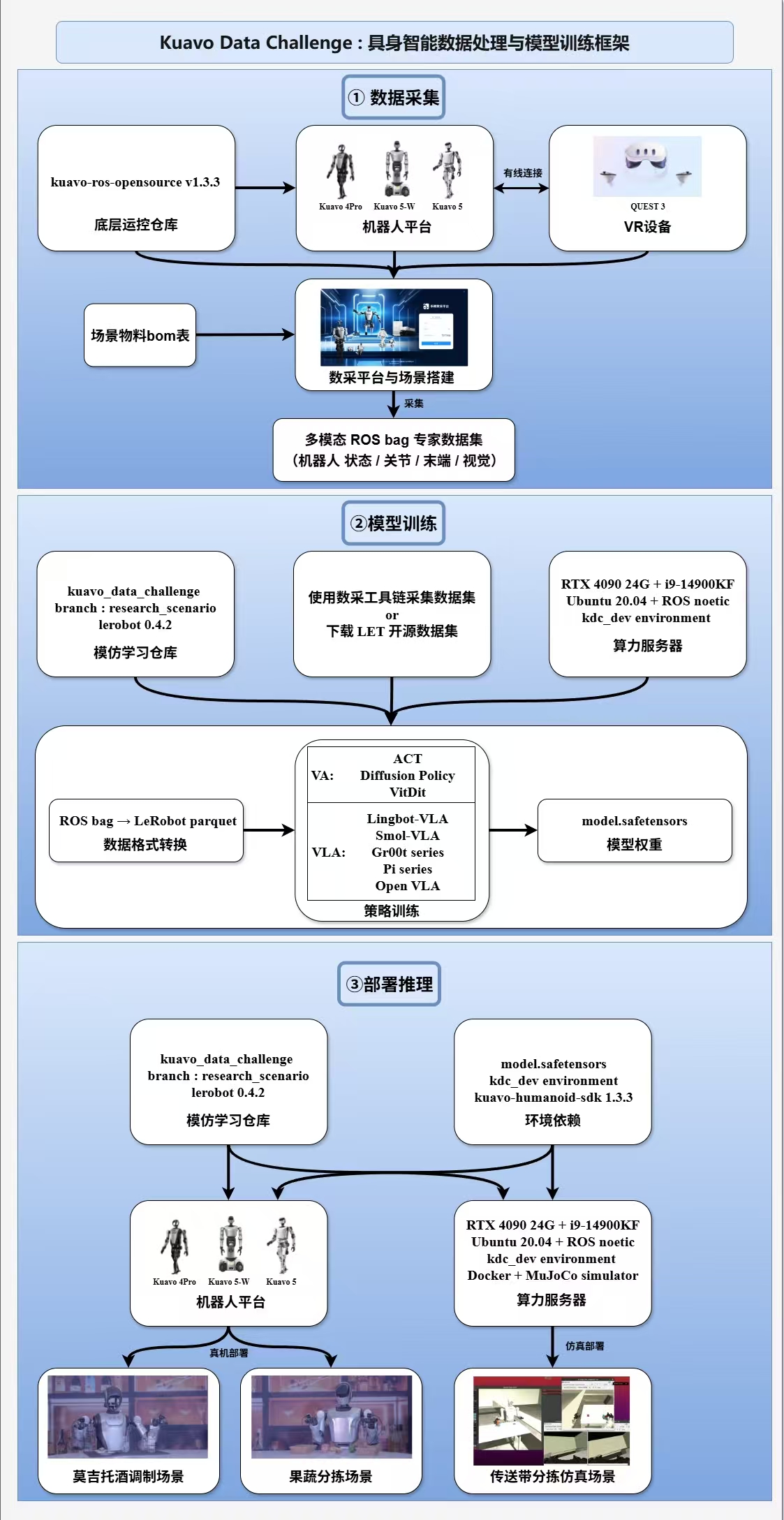
🧠 具身智能数据处理与模型训练框架
📝 案例概述
这是一个基于夸父机器人的具身智能数据处理与模型训练框架,支持 Kuavo 4pro & Kuavo 5 & Kuavo 5W
| Kuavo 4pro 莫吉托酒调制 | Kuavo 5 果蔬分拣 |
|---|---|
 |
 |
该案例介绍如何使用 乐聚数采平台 采集数据,kuavo_data_challenge 仓库配置服务器、真机环境,数据格式转换,模型训练和 Kuavo 4pro & Kuavo 5 & Kuavo 5W 真机部署推理。并实现乐聚夸父机器人 Kuavo 4pro 莫吉托酒调制场景 和 Kuavo 5 果蔬分拣场景。。
🗺️ 框架图示
🔧 硬件配置
- 机器人平台 :Kuavo 4pro & Kuavo 5 & Kuavo 5W
- VR设备 :Quest3
- 路由器 :小米 BE6500 Pro WiFi7 * 1
- USB转网口设备:绿巨能USB3.0千兆有线网卡 * 1
- Type-C转网口设备:绿联Type-C转网口RJ45 * 1
- 网线:2m 千兆网线 * 2
- 算力服务器:
- GPU:NVIDIA GeForce RTX 4090 D 24G
- CPU:Intel i9-14900KF
- 内存:64G
- 存储:2TB
路由器、USB转网口设备、Type-C转网口设备 也可以使用其他能被正常识别的型号
🧩 软件环境
- 算力服务器:Ubuntu 20.04 + ROS noetic + NVIDIA CUDA Toolkit
- 下位机
kuavo-ros-opensource仓库版本:tag 1.3.3 - 模仿学习
kuavo_data_challenge仓库分支: research_scenario kuavo-humanoid-sdkSDK 版本: 1.3.3lerobotversion: 0.4.2
🤖 机器人模仿学习全流程
🔧 环境配置
🤖 KUAVO-DATA-CHALLENGE 是一个完整的机器人模仿学习框架,基于 LeRobot 构建,专为 Kuavo 人形机器人设计。该框架提供了从数据转换、模型训练到真机部署的完整工具链。
更多使用说明、数据集规范与策略介绍,可前往📖 Kuavo Data Challenge 官方文档站
🎯 核心特性:
- 🔄 数据转换: 支持 ROS bag 到 LeRobot parquet 格式的转换
- 🚀 一键训练: IL 模型训练框架 (diffusion policy, ACT)
- 🎮 实时部署: 支持训练模型在实际机器人上的实时推理和控制
♻️ 环境要求
- 系统:推荐 Ubuntu 20.04(22.04 / 24.04 建议使用 Docker 容器运行)
- Python:推荐 Python 3.10
- ROS:ROS Noetic + Kuavo Robot ROS 补丁(支持 Docker 内安装)
- 依赖:Docker、NVIDIA CUDA Toolkit(如需 GPU 加速)
🔔 /目录下存储空间有限,建议以下操作在/media/data目录下进行
📦 安装指南
1. 操作系统环境配置
推荐 Ubuntu 20.04 + ROS noetic + NVIDIA CUDA Toolkit + Docker。
详细步骤(展开查看),仅供参考
a. 安装操作系统与 NVIDIA 驱动
sudo apt update
sudo apt upgrade -y
ubuntu-drivers devices
# 测试通过版本为 535,可尝试更新版本(请勿使用 server 分支)
sudo apt install nvidia-driver-535
# 重启计算机
sudo reboot
# 验证驱动
nvidia-smi
b. 安装 NVIDIA Container Toolkit
sudo apt install curl
curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg
curl -s -L https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list | sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list
sudo apt-get update
export NVIDIA_CONTAINER_TOOLKIT_VERSION=1.17.8-1
sudo apt-get install -y nvidia-container-toolkit=${NVIDIA_CONTAINER_TOOLKIT_VERSION} nvidia-container-toolkit-base=${NVIDIA_CONTAINER_TOOLKIT_VERSION} libnvidia-container-tools=${NVIDIA_CONTAINER_TOOLKIT_VERSION} libnvidia-container1=${NVIDIA_CONTAINER_TOOLKIT_VERSION}
c. 安装 Docker
sudo apt update
sudo apt install git
sudo apt install docker.io
# 配置 NVIDIA Runtime
nvidia-ctk
sudo nvidia-ctk runtime configure --runtime=docker
sudo systemctl restart docker
sudo docker info | grep -i runtime
# 输出中应包含 "nvidia" Runtime
2. ROS 环境配置
由于真机kuavo机器人是ubuntu20.04 + ROS Noetic(非docker),因此推荐直接安装 ROS Noetic,若因ubuntu版本较高无法安装 ROS Noetic,可使用docker。
a. 系统直接安装 ROS Noetic(推荐)(展开查看),仅供参考
- 官方指南:ROS Noetic 安装
- 国内加速源推荐:小鱼ROS
安装示例:
wget http://fishros.com/install -O fishros && . fishros
# 菜单选择:5 配置系统源 → 2 更换源并清理第三方源 → 1 添加ROS源
wget http://fishros.com/install -O fishros && . fishros
# 菜单选择:1 一键安装 → 2 不更换源安装 → 选择 ROS1 Noetic 桌面版
测试 ROS 安装:
roscore # 新建终端
rosrun turtlesim turtlesim_node # 新建终端
rosrun turtlesim turtle_teleop_key # 新建终端
b. 使用 Docker 安装 ROS Noetic(展开查看),仅供参考
- 首先最好是换个源:
sudo vim /etc/docker/daemon.json
- 然后在这个json文件中写入一些镜像源:
{
"registry-mirrors": [
"https://docker.m.daocloud.io",
"https://docker.imgdb.de",
"https://docker-0.unsee.tech",
"https://docker.hlmirror.com",
"https://docker.1ms.run",
"https://func.ink",
"https://lispy.org",
"https://docker.xiaogenban1993.com"
]
}
- 然后保存文件并退出后,重启docker服务:
sudo systemctl daemon-reload && sudo systemctl restart docker
- 现在开始创建镜像,首先建立Dockerfile:
mkdir /path/to/save/docker/ros/image
cd /path/to/save/docker/ros/image
vim Dockerfile
然后在Dockerfile文件中写入如下内容:
FROM ubuntu:20.04
ENV DEBIAN_FRONTEND=noninteractive
RUN sed -i 's|http://archive.ubuntu.com/ubuntu/|http://mirrors.tuna.tsinghua.edu.cn/ubuntu/|g' /etc/apt/sources.list && \
sed -i 's|http://security.ubuntu.com/ubuntu/|http://mirrors.tuna.tsinghua.edu.cn/ubuntu/|g' /etc/apt/sources.list
RUN apt-get update && apt-get install -y locales tzdata gnupg lsb-release
RUN locale-gen en_US.UTF-8
ENV LANG=en_US.UTF-8 LANGUAGE=en_US:en LC_ALL=en_US.UTF-8
# 设置ROS的debian源
RUN sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加ROS的Keys
RUN apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 安装ROS Noetic
# 设置键盘布局为 Chinese
RUN apt-get update && \
apt-get install -y keyboard-configuration apt-utils && \
echo 'keyboard-configuration keyboard-configuration/layoutcode string cn' | debconf-set-selections && \
echo 'keyboard-configuration keyboard-configuration/modelcode string pc105' | debconf-set-selections && \
echo 'keyboard-configuration keyboard-configuration/variant string ' | debconf-set-selections && \
apt-get install -y ros-noetic-desktop-full && \
apt-get install -y python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential && \
rm -rf /var/lib/apt/lists/*
# 初始化rosdep
RUN rosdep init
写入完毕后保存退出。
- 执行ubuntu20.04 + ROS Noetic镜像的构建:
sudo docker build -t ubt2004_ros_noetic .
- 构建完成后进入镜像即可,初次启动容器加载镜像:
sudo docker run -it --name ubuntu_ros_container ubt2004_ros_noetic /bin/bash
# 或 GPU 启动(推荐)
sudo docker run -it --gpus all --runtime nvidia --name ubuntu_ros_container ubt2004_ros_noetic /bin/bash
# 可选,挂载本地目录路径等
# sudo docker run -it --gpus all --runtime nvidia --name ubuntu_ros_container -v /path/to/your/code:/root/code ubt2004_ros_noetic /bin/bash
之后每次加载:
sudo docker start ubuntu_ros_container
sudo docker exec -it ubuntu_ros_container /bin/bash
- 或者:自定义启动加载文件,launch_docker.sh, 注意,由于涉及挂载python环境,请在第4步完成后再使用这种sh方式!
#!/bin/bash
# Paths
CODE_DIR=/path/to/code
PYTHON_DIR=/path/to/python_env
DATA_DIR=/path/to/data
IMAGE=ros:noetic
CONTAINER=ros_noetic
# Create container if it doesn't exist
if ! docker ps | grep -q "$CONTAINER"; then
echo "🛠 Creating container $CONTAINER ..."
docker create --name=$CONTAINER $IMAGE
fi
# Run container with mounts and environment
echo "🚀 Starting container $CONTAINER ..."
docker run \
-i -t \
-v $CODE_DIR:/code \
-v $DATA_DIR:/data \
-v $PYTHON_DIR:$PYTHON_DIR \
--env PATH=/path/to/python_venv/kdc_dev/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin \
$CONTAINER /bin/bash
- 进入镜像后,初始化ros环境变量,然后启动roscore
source /opt/ros/noetic/setup.bash
roscore
无误的话,ubuntu20.04 + ros noetic的docker配置方式就结束了。
⚠️ 警告:如果上述中ROS使用的是docker环境,下方后续的代码可能需要在容器里面运行,如有问题,请核对当前是否在容器内!
3. 克隆代码
# SSH
git clone git@github.com:LejuRobotics/kuavo_data_challenge.git
# 或者
# HTTPS
git clone https://github.com/LejuRobotics/kuavo_data_challenge.git
cd kuavo-data-challenge
# 切换分支
git checkout research_scenario
# 更新third_party下的lerobot子模块:
git submodule init
git submodule update --recursive --progress
cd third_party/lerobot/
git reset --hard 0f551df8f4bad4c504e395ea3df74fc5f714016f # 切换 0.4.2 commit
4. Python 环境配置
使用 conda (推荐)或 python venv 创建虚拟环境 kdc_dev(python 3.10):
- ananconda配置:
conda create -n kdc_dev python=3.10
conda activate kdc_dev
- 或, 源码安装Python3.10.18,再用venv创建虚拟环境
⚠️ 注意:ppa:deadsnakes 在2025年6月后不能在ubuntu20.04上提供了,下述安装方式不一定成功:
sudo apt update
sudo apt install -y software-properties-common
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt update
sudo apt install -y python3.10 python3.10-venv python3.10-dev
可以尝试下,不行请使用源码安装:
sudo apt update
sudo apt install -y build-essential libssl-dev zlib1g-dev libncurses5-dev libncursesw5-devlibreadline-dev libsqlite3-dev libgdbm-dev libdb5.3-dev libbz2-dev libexpat1-dev liblzma-dev tk-dev libffi-dev uuid-dev wget
wget https://www.python.org/ftp/python/3.10.18/Python-3.10.18.tgz
tar -xzf Python-3.10.18.tgz
cd Python-3.10.18
./configure --prefix=$HOME/python3.10 --enable-optimizations
make -j$(nproc)
sudo make install
然后创建venv环境:
python3.10 -m venv kdc_dev
source kdc_dev/bin/activate
查看和确保安装正确:
python # 查看python版本,看到确认输出为3.10.xxx(通常是3.10.18)
# 输出示例:
# Python 3.10.18 (main, Jun 5 2025, 13:14:17) [GCC 11.2.0] on linux
# Type "help", "copyright", "credits" or "license" for more information.
# >>>
pip --version # 查看pip对应的版本,看到确认输出为3.10的pip
# 输出示例:pip 25.1 from /path/to/your/env/python3.10/site-packages/pip (python 3.10)
5. 安装依赖:
source /opt/ros/noetic/setup.bash # 进入python环境先source好ros自带的python库,建议这行写入~/.bashrc
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple # 建议首先换源,能加快下载安装速度
# 算力服务器
pip install -r requirements_ilcode.txt # 无需ROS Noetic,但只能使用kuavo_train模仿学习训练代码,kuavo_data(数转)及 kuavo_deploy(部署代码)均依赖ROS
# 或
pip install -r requirements_total.txt # 需确保 ROS Noetic 已安装 (推荐)
# 机器人上位机 AGX orin
pip install -r requirements_total_agxorin.txt # 需确保 ROS Noetic 已安装 (推荐)
安装完打印下检查下lerobot版本:2025年11月20日为0.4.2版本
pip show lerobot
若不是 0.4.2:
cd third_party/lerobot
git fetch
git reset --hard 0f551df8f4bad4c504e395ea3df74fc5f714016f
cd ../../
重新pip install -r requirement即可。
如果pip安装完毕但运行训练代码时报ffmpeg或torchcodec的错:
conda install ffmpeg==6.1.1
# 或
# pip uninstall torchcodec
📦 数据采集
- ⚠️⚠️⚠️ 注意: 下位机代码使用标签为
1.3.3的kuavo-ros-opensourcekuavo-ros-opensource · Gitee
⚠️⚠️⚠️ 注意:采集前先对机器人做 头部和手部零点标定 ,标记零点位置(手臂正常摆直,头部需要保证在采集时摄像头能看清完整场景),保证采集和部署时机器人零点一致,头部和手臂零点会对模型部署效果产生影响。
章节介绍
数据采集是采集基于
ROS录制某一时间段机器人行为生成的RosBag包,可将其视为原始数据。提供给模型训练的是需要经过转化的数据,因此本数据采集系统除了提供最基础的数据采集功能外,还提供了数据处理功能。同时,鉴于机器人末端不同、资源存储路径存在差异等原因,本数据采集系统提供了灵活的参数配置。
🚀 乐聚数采平台
乐聚数采管理平台是一款专为具身智能领域打造SaaS服务平台,它提供了数据采集、标注、审核、存储、管理、可视化等功能,更好的帮助用户高效管理与分析数据。


- 平台详细使用说明请查看乐聚数采平台 用户手册
1. 确认环境
确认上位机agx主目录 /home/leju_kuavo 下存在 kuavo_data_pilot 工作空间,目录结构如下:
kuavo_data_pilot/
├── src/ # 核心功能模块
│ ├── kuavo_data_pilot_bin # 相机启动脚本与Gradio平台
│ ├── kuavo_msgs/ # 消息依赖
│ ├── manipulation_nodes/ # 数采平台依赖
│ ├── OrbbecSDK_ROS1/ # 奥比中光相机功能包
│ └── realsense-ros/ # realsense相机功能包
└── ...
2.设备管理
- ① 配置机器人:填写上位机IP地址 ,点击 MAC 地址右边刷新键 即可自动获取上位机无线网卡 MAC 地址
- ② 配置 NAS(如果有)
3.新增采集任务
按照 乐聚数采平台 用户手册 任务配置 和 乐聚数采平台 用户手册 业务流程 配置场景、新增采集任务。
4.配置手腕相机
- 上位机AGX终端执行
rs-enumerate-devices查看左右手腕相机Device info/Serial Number - 终端执行
sudo vim /etc/kuavo.conf将查到的设备号改入CAMERA_LEFT=,CAMERA_RIGHT= - 终端执行:
sudo systemctl start start_camera.service
- 另开终端执行
rqt_image_view查看cam_hcam_lcam_r对应话题画面是否正确,如果左右手腕相机画面相反,返回第2步交换设备号 - 确认相机设置正确后可选择设置相机服务开机自启:
sudo systemctl enable start_webserver.service
5.连接数采平台
上位机终端执行
sudo systemctl start start_webserver.service # 启动websocket连接服务
sudo journalctl -u start_webserver.service -f # 查看服务运行日志,首次启动服务会先安装一系列依赖,更新deb版本
sudo systemctl enable start_webserver.service # 确认正常后可选择设置开机自启动服务
- 此时进入数据采集,配置好的机器人设备状态会由
离线转为空闲,点击空闲,界面会显示机器人三个摄像头的画面,状态空闲转为忙碌。 - 以后启动机器人,若上位机IP不变,进入数采平台即可直接连接机器人。
6.启动机器人VR遥操
- 参考教程 VR使用开发案例
启动 位置增量 + 姿态绝对 VR遥操程序 ,有线VR方案参考 有线VR方案使用指南
# 下位机执行
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch \
ip_address:=your_quest_ip \
use_cpp_incremental_ik:=true \
use_incremental_hand_orientation:=false
- VR程序启动后,点击
开始采集即可进行数采任务。 - 后面的数据标注、审核、导出工作按 乐聚数采平台 用户手册 操作即可。
- 数采任务完成后可再多采集一个
go_bag.bag,用于模型部署推理时控制机器人手臂到达工作开始位置。
🚀 kuavo_data_challenge 使用方法
🌐 LET开源数据集
LET数据集 基于全尺寸人形机器人 Kuavo 采集,涵盖多场景、多类型操作的真实世界多任务数据。面向机器人操作、移动与交互任务,支持真实环境下的可扩展机器人学习。
数据集链接: LET全尺寸人形机器人真机数据集

- 案例一 莫吉托酒调制 使用的ROS bag 数据集已上传至 LET全尺寸人形机器人真机科研场景数据集[let_research_dataset/rosbag/real/Unlabelled/Cocktail_Making-P4-Claw]
- 案例二 果蔬分拣 ROS bag 数据集已上传至 LET全尺寸人形机器人真机科研场景数据集[let_research_dataset/rosbag/real/Unlabelled/Fruit_Vegetable_Sorting-P5-claw]
1. 数据格式转换
详细步骤
- ⚠️⚠️⚠️ 从数采平台直接导出 lerobot 格式数据集,可跳过此步。数据集来源
- 从 LET开源数据集 下载 rosbag 数据集
- 使用 gym工具 下载数采平台云端 rosbag 数据集,参考 gym工具使用说明 。
将 Kuavo 原生 rosbag 数据转换为 Lerobot 框架可用的 parquet 格式:
##### Kuavo 5
python kuavo_data/CvtRosbag2Lerobot.py \
--config-path=../configs/data/ \
--config-name=KuavoRosbag2Lerobot_kuavo5.yaml \
rosbag.rosbag_dir=/path/to/rosbag \
rosbag.lerobot_dir=/path/to/lerobot_data
##### Kuavo 4pro
python kuavo_data/CvtRosbag2Lerobot.py \
--config-path=../configs/data/ \
--config-name=KuavoRosbag2Lerobot_kuavo4pro.yaml \
rosbag.rosbag_dir=/path/to/rosbag \
rosbag.lerobot_dir=/path/to/lerobot_data
说明:
rosbag.rosbag_dir:原始 rosbag 数据路径rosbag.lerobot_dir:转换后的lerobot-parquet 数据保存路径,通常会在此目录下创建一个名为lerobot的子文件夹configs/data/KuavoRosbag2Lerobot.yaml:配置文件
配置文件
使用KuavoRosbag2Lerobot.yaml进行配置,关键配置项说明:
| 参数 | 描述 | 示例值 |
|---|---|---|
eef_type |
末端执行器类型,可选:leju_claw,qiangnao | qiangnao |
which_arm |
需要哪一只手臂的关节 + 图像数据,可选: left, right, both | both |
use_depth |
是否需要深度图像数据 | true |
task_description |
任务描述,自定义 | "Pick and Place" |
train_hz |
训练数据的采样频率 | 10 |
resize/width |
主相机图像缩放宽度 | 848 |
2. 模仿学习训练
详细步骤
使用转换好的数据进行模仿学习训练:
python kuavo_train/train_policy.py \
--config-path=../configs/policy/ \
--config-name=diffusion_config.yaml \
task=your_task_name \
method=your_method_name \
root=/path/to/lerobot_data/lerobot \
training.batch_size=32 \
policy_name=diffusion
说明:
--config-name: 配置文件,对应policy_name填写diffusion_config.yaml或act_config.yamltask:自定义,任务名称(最好与数转中的task定义对应),如pick and placemethod:自定义,方法名,用于区分不同的训练,如diffusion_bs128_usedepth_nofuse等root:训练数据的本地路径,注意加上lerobot,与1中的数转保存路径需要对应,为:/path/to/lerobot_data/lerobottraining.batch_size:批大小,可根据 GPU 显存调整policy_name:使用的策略,用于策略实例化的,目前支持diffusion和act- 其他参数可详见yaml文件说明,推荐直接修改yaml文件,避免命令行输入错误
配置文件
使用diffusion_config.yaml或act_config.yaml进行配置,关键配置项说明:
| 参数 | 描述 | 示例值 |
|---|---|---|
max_epoch |
最大训练轮次 | 500 |
save_freq_epoch |
模型参数保存频率 | 10 |
device |
训练设备 | cuda |
resume |
是否开启断点续训 | false |
resume_timestamp |
从outputs/train/<task>/<method>/<resume_timestamp>中加载最后一个epoch参数续训 |
run_20251118_144927 |
2.1 模仿学习训练:单机多卡模式
安装 accelerate 库: pip install accelerate (一般安装lerobot时已经安装)
accelerate launch kuavo_train/train_policy_with_accelerate.py \
--config_file configs/accelerate/accelerate_config.yaml \
--config-path=../configs/policy \
--config-name=diffusion_config.yaml
说明:
--config-name: 配置文件,对应policy_name填写diffusion_config.yaml或act_config.yaml参数配置参考上面2. 模仿学习训练详细参数说明
配置文件
使用accelerate_config.yaml进行配置,关键配置项说明:
| 参数 | 描述 | 示例值 |
|---|---|---|
num_processes |
该实例中使用进程数(对应GPU数) | 2 |
gpu_ids |
指定使用第几号GPU | "0,1" |
3. 真机模型部署
详细步骤
完成训练后调用模型进行真机部署:
修改配置文件 kuavo_env.yaml,env_name为Kuavo-Real,其他如eef_type,obs_key_map等按需修改,即可在真机上部署测试。
-
如果是4pro机器人,选择配置文件
kuavo_env_kuavo4pro.yaml;如果是5代人形,选择配置文件kuavo_env_kuavo5.yaml -
边侧机推理请见 边侧机通信配置方案
配置文件
关键配置项说明:
| 参数 | 描述 | 示例值 |
|---|---|---|
env_name |
kuavo环境名称 | Kuavo-Real |
eef_type |
末端执行器类型,可选:leju_claw,qiangnao | qiangnao |
which_arm |
需要哪一只手臂的关节 + 图像数据,可选: left, right, both | right |
head_init |
机器人头部初始位置 | null |
ros_rate |
推理控制频率 | 10 |
image_size |
主相机图像大小:宽,高 | &IMGSIZE [848, 480] |
frame_alignment |
是否启用帧对齐 | true |
go_bag_path |
到达工作位置的bag | /path/to/your/go.bag |
policy_type |
策略名字 | "act" |
device |
推理设备 | cuda |
task |
任务名 | "your_task" |
method |
方法名 | "your_method" |
timestamp |
时间戳 | "your_timestamp" |
epoch |
训练输出的轮次,可填50,100,best等 | best |
max_episode_steps |
最大回合步数 | 200 |
⚠️ 注意:
- 模型部署 配置文件中的参数需与 数据格式转换 或 数采平台导出 配置参数一致
- 代码将在
outputs/train/<task>/<method>/<timestamp>/epoch<epoch>中load policy的模型参数
3.1 硬件启动
机器人正常站立后,调用 /enable_wbc_arm_trajectory_control ROS 服务,启用 WBC(Whole Body Control,全身控制)手臂轨迹控制,并将控制模式设置为 1(自动摆臂模式):
rosservice call /enable_wbc_arm_trajectory_control "control_mode: 1"
3.2 真机推理部署脚本
- 启动真机推理部署脚本:
python kuavo_deploy/eval_kuavo.py
命令行弹出提示:
=== Kuavo机器人控制示例 ===
此脚本展示如何使用命令行参数控制不同的任务
-e 支持暂停、继续、停止功能
📋 控制功能说明:
🔄 暂停/恢复: 发送 SIGUSR1 信号 (kill -USR1 <PID>)
⏹️ 停止任务: 发送 SIGUSR2 信号 (kill -USR2 <PID>)
📊 查看日志: tail -f log/kuavo_deploy/kuavo_deploy.log
1. 显示帮助信息:
python kuavo_deploy/src/scripts/script.py --help
2. 干运行模式 - 查看将要执行的操作:
python kuavo_deploy/src/scripts/script.py --task go --dry_run --config /path/to/custom_config.yaml
3. 到达工作位置:
python kuavo_deploy/src/scripts/script.py --task go --config /path/to/custom_config.yaml
4. 从当前位置直接运行模型:
python kuavo_deploy/src/scripts/script.py --task run --config /path/to/custom_config.yaml
5. 插值至bag的最后一帧状态开始运行:
python kuavo_deploy/src/scripts/script.py --task go_run --config /path/to/custom_config.yaml
6. 从go_bag的最后一帧状态开始运行:
python kuavo_deploy/src/scripts/script.py --task here_run --config /path/to/custom_config.yaml
7. 回到零位:
python kuavo_deploy/src/scripts/script.py --task back_to_zero --config /path/to/custom_config.yaml
8. 仿真中自动测试模型,执行eval_episodes次:
python kuavo_deploy/src/scripts/script_auto_test.py --task auto_test --config /path/to/custom_config.yaml
9. 启用详细输出:
python kuavo_deploy/src/scripts/script.py --task go --verbose --config /path/to/custom_config.yaml
=== 任务说明 ===
go - 先插值到bag第一帧的位置,再回放bag包前往工作位置
run - 从当前位置直接运行模型
go_run - 到达工作位置直接运行模型
here_run - 插值至bag的最后一帧状态开始运行
back_to_zero - 中断模型推理后,倒放bag包回到0位
auto_test - 仿真中自动测试模型,执行eval_episodes次
请选择要执行的示例: 1. 显示普通测试帮助信息 2. 显示自动测试帮助信息 3. 进一步选择示例
1. 执行: python kuavo_deploy/src/scripts/script.py --help
2. 执行: python kuavo_deploy/src/scripts/script_auto_test.py --help
3. 进一步选择示例
请选择要执行的示例 (1-3) 或按 Enter 退出:
在命令行输入3,按 Enter ,弹出提示
请输入自定义配置文件路径:
输入自定义配置文件路径,默认配置文件参考configs/deploy/kuavo_env_kuavo4pro.yaml;如果是5代,输入路径 configs/deploy/kuavo_env_kuavo5.yaml,弹出提示
📁 配置文件路径: configs/deploy/kuavo_env.yaml
🔍 正在解析配置文件...
📋 模型配置信息:
Task: your_task
Method: your_methof
Timestamp: your_timestamp
Epoch: 300
📂 完整模型路径: your_path
✅ 模型路径存在
可选择要执行的示例如下:
1. 先插值到bag第一帧的位置,再回放bag包前往工作位置(干运行模式)
执行: python kuavo_deploy/src/scripts/script.py --task go --dry_run --config /path/to/config.yaml
2. 先插值到bag第一帧的位置,再回放bag包前往工作位置
执行: python kuavo_deploy/src/scripts/script.py --task go --config /path/to/config.yaml
3. 从当前位置直接运行模型
执行: python kuavo_deploy/src/scripts/script.py --task run --config /path/to/config.yaml
4. 到达工作位置并直接运行模型
执行: python kuavo_deploy/src/scripts/script.py --task go_run --config /path/to/config.yaml
5. 插值至bag的最后一帧状态开始运行
执行: python kuavo_deploy/src/scripts/script.py --task here_run --config /path/to/config.yaml
6. 回到零位
执行: python kuavo_deploy/src/scripts/script.py --task back_to_zero --config /path/to/config.yaml
7. 先插值到bag第一帧的位置,再回放bag包前往工作位置(启用详细输出)
执行: python kuavo_deploy/src/scripts/script.py --task go --verbose --config /path/to/config.yaml
8. 仿真中自动测试模型,执行eval_episodes次
执行: python kuavo_deploy/src/scripts/script_auto_test.py --task auto_test --config /path/to/config.yaml
9. 退出
请选择要执行的示例 (1-9)
- 选择需要的功能,一般先输入
2前往工作位置,再输入3启动真机同步推理程序,p暂停推理,s / ctrl+c停止推理
3.3 真机异步推理
步骤同 3.2 真机推理部署脚本,输入 2 前往工作位置后,执行下面真机异步推理程序
##### Kuavo 4pro
python kuavo_deploy/eval_kuavo_async_no_lock_kuavo4pro.py --kuavo-config-path /your_working_dir/configs/data/KuavoRosbag2Lerobot_kuavo4pro.yaml --device=cuda --fps=10 --task="tiaojiu" --duration=300
##### Kuavo 5
python kuavo_deploy/eval_kuavo_async_no_lock_kuavo5.py --kuavo-config-path /your_working_dir/configs/data/KuavoRosbag2Lerobot_kuavo5.yaml --device=cuda --fps=10 --task="pick fruit" --duration=300
⚠️⚠️⚠️ 首次执行需小心,可将机器人身旁物品先移开,观察到达工作位置和运行模型是否正常,符合预期
4. 推理效果调优
详细步骤
- 以ACT算法为例
4.1 同步推理
ACT 策略在每次取动作前会按配置决定「用整段 chunk 还是只取前几步」「是否做时间集成」。以下参数在 configs/policy/act_config.yaml 的 policy 下配置,影响平滑性、实时性与推理频率。
| 参数 | 位置(配置) | 典型取值 / 默认 | 说明 |
|---|---|---|---|
| temporal_ensemble_coeff | policy.temporal_ensemble_coeff |
None或 0.01 / -0.1 等 |
非 None 时启用时间集成:每步都推理整段 chunk,对多步预测做指数加权平均再输出当前步动作。系数大于 0(如 0.01)偏旧动作、更平滑;小于 0(如 -0.1)偏新动作、更跟当前观测。启用时 n_action_steps 必须为 1,且每步都推理,计算量较大。 |
| n_action_steps | policy.n_action_steps |
1 或 1~chunk_size | 每次推理后从 chunk 中实际取用的步数:取前 n_action_steps 步入队,逐步执行,队空再推理。越小(如 1~10)推理越频繁、动作越跟观测、实时性更好,但算力与延迟增加;越大(如 50~100)推理更少、更平滑、延迟感更小,但对突发变化反应更慢。 |
- 实现与约束:逻辑在
third_party/lerobot/src/lerobot/policies/act/modeling_act.py的ACTPolicy.select_action()
4.2 异步推理
异步推理(eval_kuavo_async_no_lock_kuavo.py)通过动作缓冲区 + 推理线程 + 执行线程解耦推理与执行,影响平滑性、实时性、推理频率与断档风险。
| 参数/环节 | 位置(代码/配置) | 当前默认值 | 说明 |
|---|---|---|---|
| action_buffer_size | ACTAsyncRealDemoConfig.action_buffer_size |
20 | 动作缓冲区容量。越大越能吸收推理抖动、不易断档,但旧动作堆积会增延迟;越小越跟最新规划,但易出现 buffer 空、执行卡顿。 |
| min_buffer_size | ACTAsyncRealDemoConfig.min_buffer_size |
4 | 当 buffer 中动作数 ≤ 此值时触发新一轮推理。越大越早触发、推理更频繁、动作更新更及时,算力与实时性更高;越小触发越晚、推理更少,可能断档。 |
| chunk 取段 | action_buffer.put(postprocessed_actions[...] |
[5:25](取 20 步) |
每次推理得到的 chunk 只取索引 5~25入队并替换旧缓冲。取段越靠前越跟当前观测,越靠后越平滑。 |
| 推理后 sleep | get_actions_async 内单次推理后 |
max(0, 0.03 - inference_model_time) |
单次推理后至少间隔约 30ms,限制推理频率,避免占满 CPU。 |
- 实现文件:
kuavo_deploy/eval_kuavo_async_no_lock_kuavo.py
4.3 模型输出与动作平滑
模型输出的关节目标会经过裁剪(关节末端范围限制)、首帧插值、帧间插值、低通滤波再下发给机器人。以下参数目前均在代码中固定,仅作说明;若需调节平滑性与响应速度,可尝试修改对应代码与默认值。
| 环节 | 位置(代码) | 当前默认值 | 说明 |
|---|---|---|---|
| 低通滤波 | kuavo_deploy/kuavo_env/KuavoBaseRosEnv.py 中导入 LowPassFilter |
cutoff_hz=1.0, dt=0.01 |
对每步下发的动作做一阶低通,减小高频抖动。cutoff_hz 越小越平滑、跟踪越慢,可尝试 0.5~2.0。 |
| 首帧插值 | step() 内首帧部分 |
num_points=100, dt=0.01(总时长约 1s) |
从当前关节状态线性插值到第一拍目标。点数越多、每步间隔越小,首步越平滑。 |
| 帧间插值 | step() 内非首帧部分 |
action_dt=0.1, interpolated_dt=0.01(10 个插值点) |
上一拍动作到当前动作的线性插值总时长与步长。增大 action_dt(如 0.15~0.2)可提高平滑性,但会略增延迟。 |
- 实现文件:
动作执行在kuavo_deploy/kuavo_env/KuavoBaseRosEnv.py(step()、exec_action())
低通滤波器在kuavo_deploy/kuavo_env/lowpass_filter.py(LowPassFilter:cutoff_hz/tau、dt、alpha)。
5. 说明
详细步骤
📡 ROS 话题说明
| 话题名 | 功能说明 |
|---|---|
/cam_h/color/image_raw/compressed |
上方相机 RGB 彩色图像 |
/cam_h/深度/image_raw/compressedDepth |
上方相机深度图,realsense |
/cam_l/color/image_raw/compressed |
左侧相机 RGB 彩色图像 |
/cam_l/深度/image_rect_raw/compressedDepth |
左侧相机深度图,realsense |
/cam_r/color/image_raw/compressed |
右侧相机 RGB 彩色图像 |
/cam_r/深度/image_rect_raw/compressedDepth |
右侧相机深度图,realsense |
/control_robot_hand_position |
灵巧手关节角控制指令 |
/dexhand/state |
灵巧手当前关节角状态 |
/leju_claw_state |
乐聚夹爪当前关节角状态 |
/leju_claw_command |
乐聚夹爪关节角控制指令 |
/joint_cmd |
所有关节的控制指令 |
/kuavo_arm_traj |
机器人机械臂轨迹控制 |
/sensors_data_raw |
所有传感器原始数据 |
📁 代码输出结构
输出/
├── train/<task>/<method>/run_<timestamp>/ # 训练模型与参数
├── eval/<task>/<method>/run_<timestamp>/ # 测试日志与视频
📂 核心代码结构
KUAVO-DATA-CHALLENGE/
├── configs/ #配置文件
├── kuavo_data/ # 数据处理转换模块
├── kuavo_deploy/ # 部署脚本(模拟器/真机)
├── kuavo_train/ # 模仿学习训练代码
├── lerobot_patches/ # Lerobot 运行补丁
├──outputs/ # 模型与结果
├──third_party/ # Lerobot 依赖
└──requirements_xxx.txt #依赖列表
└── README.md # 说明文档
🔬 科研场景实现
🍸 莫吉托酒调制 -- 长程任务拆解能力
🏠 场景介绍
莫吉托酒调制长程任务 执行流程:
- ① 初始状态为机器人双手抬起,位于吧台上方
- ② 右夹爪夹持柠檬,放入莫吉托杯
- ③ 右夹爪夹持薄荷叶,放入莫吉托杯,右夹爪归位
- ④ 左夹爪夹持气泡水瓶,将气泡水平稳倒入杯中,丢弃空瓶
- ⑤ 左夹爪夹持朗姆酒瓶,将酒液平稳倒入杯中,稳定放置酒瓶,左夹爪归位
🖥️ 系统环境
- 机器人版本:KUAVO 4PRO MAXA + 夹爪
- 下位机
kuavo-ros-opensource仓库版本:tag 1.3.3 - 模仿学习
kuavo_data_challenge仓库分支: research_scenario kuavo-humanoid-sdkSDK 版本: 1.3.3lerobotversion: 0.4.2- VR模式:位置增量 + 姿态绝对 + 有线(建议)
- 模仿学习框架:ACT
📦 场景所需物品
| 物品 | 数量 | 尺寸 | 图片 | 购买链接(参考) |
|---|---|---|---|---|
| 白色餐盘 | 2 | 直径:15cm,高度:2cm |  |
链接 |
| 白朗姆酒 | 1 | 百加得40°白朗姆酒500ml |  |
链接 |
| 莫吉托杯 | 1 | 大号 口径:6.3cm,高度:16cm,容量530ml |  |
链接 |
| 气泡水瓶 | 1 | 泰象苏打气泡水325ml |  |
链接 |
| 吧台垫 | 1 | 黑色70*40cm |  |
链接 |
| 倒酒器 | 1 | 304不锈钢倒酒器 |  |
链接 |
| 柠檬 | 1 | 塔希提无籽青柠檬 长度:约6cm,宽度:约4cm 切半 |  |
链接 |
| 薄荷叶 | 1 | 能放进杯中即可 |  |
任意 |
| 垃圾桶 | 1 | 任意(用于扔气泡水瓶) | 任意 | 任意 |
| 白色椭圆桌 | 1 | 高度:96cm,最大长度:240cm,最大宽度:120cm |  |
无 |
🚀 整体流程
数据采集
-
将下位机仓库 kuavo-ros-opensource 代码版本切换为 tag 1.3.3,参考 数据采集 配置好场景、机器人,将机器人与数采平台进行连接。
-
采集前先对机器人做 头部和手部零点标定 ,标记零点位置(手臂正常摆直,头部需要保证在采集时摄像头能看清完整场景),保证采集和部署时机器人零点一致,头部和手臂零点会对模型部署效果产生影响。
-
机器人启动站立程序
rostopic pub /cmd_pose
-
向
/cmd_pose话题发布空信息,控制机器人姿态归位,提高机器人数据采集时身体姿态的一致性;使用ROS话题接口或者数采平台端侧控制功能控制机器人俯视吧台,头部pitch旋转20°;标记机器人站立位置。 -
启动 位置增量 + 姿态绝对 VR遥操程序 ,有线VR参考有线VR方案使用指南
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch \
ip_address:=your_quest_ip \
use_cpp_incremental_ik:=true \
use_incremental_hand_orientation:=false
- VR控制双手抬起,位于吧台上方(工作位置)。采集30条如视频所示的完整调酒流程,对夹取柠檬这一局部动作单独采集30条,提高夹取柠檬的成功率,形成数据集。
数据转换
模型训练
- 参考 模仿学习训练 选用 ACT 策略进行训练。
模型推理
- 将训练好的模型权重放置到机器人上位机KDC仓库中,目录结构应如下:
outputs
└── train
└── your_task_name
└── your_method
└── timestamp
├── epochxxx
│ ├── config.json
│ └── model.safetensors
├── policy_postprocessor_step_0_unnormalizer_processor.safetensors
├── policy_postprocessor.json
├── policy_preprocessor_step_3_normalizer_processor.safetensors
└── policy_preprocessor.json
- 机器人正常站立后,调用
/enable_wbc_arm_trajectory_controlROS 服务,启用 WBC(Whole Body Control,全身控制)手臂轨迹控制,并将控制模式设置为 1(自动摆臂模式):
rosservice call /enable_wbc_arm_trajectory_control "control_mode: 1"
- 将
go.bag移动到机器人上位机,参考 真机模型部署 进行模型推理,复现视频效果:
- 启动真机推理部署脚本 执行
task go,先插值到go.bag第一帧的位置,再回放go.bag包前往工作位置。 - 执行真机异步推理脚本(默认参数)
kuavo_deploy/eval_kuavo_async_no_lock_kuavo4pro.py
🍎 果蔬分拣 -- 模型泛化能力
🏠 场景介绍
果蔬分拣泛化任务 执行流程:
- 以机器人第一视角,左侧为蔬菜收纳框,右侧为水果收纳框。桌面随机摆放苹果、香蕉、青椒、胡萝卜四类果蔬。机器人初始状态为双手抬起,位于桌面上方(不遮挡收纳盒)自主完成全部果蔬的识别、抓取与分类投放进两类收纳筐。
🖥️ 系统环境
- 机器人版本:KUAVO 5 MAXA + 夹爪
- 下位机
kuavo-ros-opensource仓库版本:tag 1.3.3 - 模仿学习
kuavo_data_challenge仓库分支: research_scenario kuavo-humanoid-sdkSDK 版本: 1.3.3lerobotversion: 0.4.2- VR模式:位置增量 + 姿态绝对 + 有线(建议)
- 模仿学习框架:ACT
📦 场景所需物品
| 物品 | 数量 | 尺寸 | 图片 | 购买链接(仅供参考) |
|---|---|---|---|---|
| 香蕉模型 | 1 | 长度:19cm,宽度:4.5cm |  |
无 |
| 苹果模型 | 1 | 高度:7cm,直径:7.5cm |  |
无 |
| 青椒模型 | 1 | 高度:9cm,宽度:6.5cm |  |
无 |
| 胡萝卜模型 | 2 | 长度:21cm,宽径:4.5cm |  |
无 |
| 竹筐 | 2 | 浅咖啡色 长度:30cm,宽度:20cm,高度:7cm |  |
链接 |
| 白色椭圆桌 | 1 | 高度:96cm,最大长度:240cm,最大宽度:120cm | |
无 |
🚀 整体流程
数据采集
采集流程与 莫吉托酒调制 一致,采集过程有差异:
- ① 四类果蔬随机位置、姿态摆放于桌面
- ② 先分拣靠近机器人的果蔬
- ③ 左侧靠近蔬菜筐的蔬菜用左夹爪分拣,右侧靠近水果框的水果用右夹爪分拣
- ④ 远离对应框的果蔬,则用左右手交换的方式进行分拣
数据转换与模型训练
- 整体流程与 莫吉托酒调制 一致,注意在配置参数中⚠️更改机器人版本为
KUAVO5,KUAVO5比KUAVO4pro多一个腰部自由度,读取手臂关节数据的维度有变化。
模型推理
- 整体流程与 莫吉托酒调制 一致,最后执行的是Kuavo5真机异步推理脚本(默认参数)
kuavo_deploy/eval_kuavo_async_no_lock_kuavo5.py
⚠️ 注意事项
- 每条数据在任务的起始阶段,手臂与头部姿态应尽量保持一致;每条数据在任务的结束阶段,手臂与头部姿态也应尽量保持一致。
- 采集数据需减少停顿动作,防止模型推理时因歧义产生往复运动。
- 采集数据时需避免:在相同相机画面、相同手臂姿态的条件下,出现不同的下一步动作。否则会导致训练出的模型权重存在歧义,模型无法准确判断下一步运动指令。
- 建议使用有线VR方案(低时延、动作丝滑) + 增量式VR程序(操作更容易、可执行范围更广)。