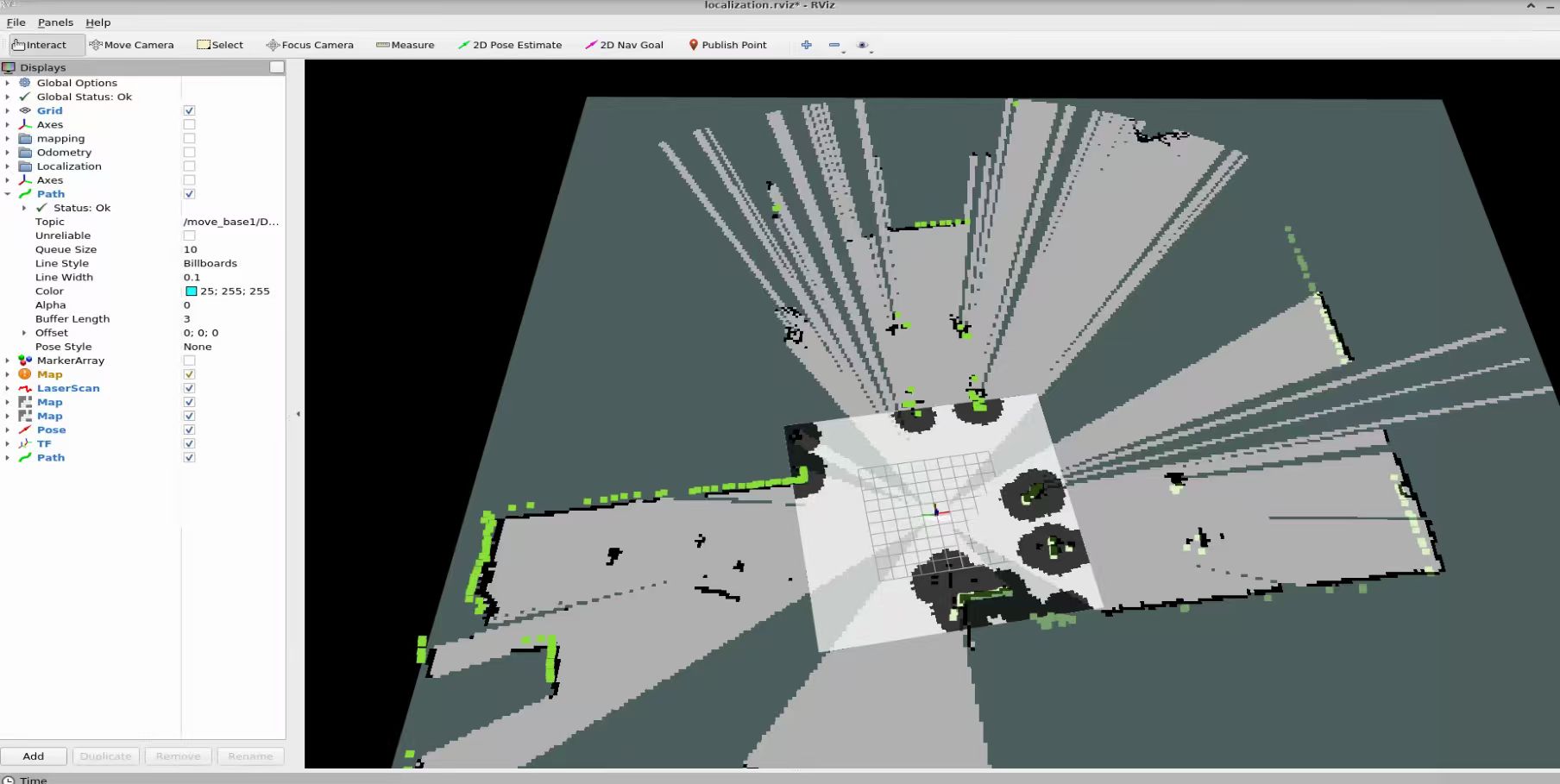
基于kuavo机器人的导航demo
基于kuavo机器人的导航demo
![基于kuavo机器人的导航demo]()
基于 Pi05 VLA 的玩偶分拣实战:从数据采集到实机推理
基于 Pi05 VLA 的玩偶分拣实战:从数据采集到实机推理
![基于 Pi05 VLA 的玩偶分拣实战:从数据采集到实机推理]()
社区动态 | OpenLET社区北京工作组正式成立
OpenLET社区北京工作组正式成立,同步启动具身数据产业基金,介绍具身智能操作任务挑战赛,举行聘书颁发仪式。随即,北京工作组召开第一次工作会议。
![社区动态 | OpenLET社区北京工作组正式成立]()
ICRA2026 | REAL-I具身智能挑战赛获奖榜单公布!
社区支持国际顶会赛事,ICRA REAL-I挑战赛获奖榜单公布!
![ICRA2026 | REAL-I具身智能挑战赛获奖榜单公布!]()
ICRA2026 | REAL-I具身智能挑战赛现场赛即将开赛!
社区支持ICRA2026顶会赛事,首届REAL-I具身智能挑战赛现场赛即将开赛!
![ICRA2026 | REAL-I具身智能挑战赛现场赛即将开赛!]()
OpenLET具身智能开源数据集社区介绍
OpenLET具身智能开源数据集社区是由开放原子开源基金会孵化,乐聚牵头建设运营的开源项目。核心聚焦人形机器人领域的真实数据开源与生态共建,致力于成为全球具身智能领域有影响力、有吸引力的真实数据资源枢纽与协作创新平台。
![OpenLET具身智能开源数据集社区介绍]()
发帖指引
发帖指引
![发帖指引]() 623 次阅读
623 次阅读社区动态 | OpenLET社区合肥中心正式成立
OpenLET社区合肥中心正式成立,同步发布智能机器人产业孵化基金——合肥具身壹号股权投资基金,启动具身智能数据与操作应用挑战赛。
![社区动态 | OpenLET社区合肥中心正式成立]()
社区动态 | OpenLET具身智能开源数据集社区公布工作委员会名单
OpenLET具身智能开源数据集社区工作委员会已正式成立,现公布相关名单
![社区动态 | OpenLET具身智能开源数据集社区公布工作委员会名单]()
社区动态 | OpenLET具身智能开源数据集社区工作委员会正式成立与宁波分中心揭牌
近日,OpenLET具身智能开源数据集社区工作委员会正式成立。同期,开放原子OpenLET社区宁波中心正式揭牌。
![社区动态 | OpenLET具身智能开源数据集社区工作委员会正式成立与宁波分中心揭牌]()