
强化学习运动控制框架合集

硅基生命训练师
本文介绍如何使用乐聚的两个开源仓库 LejuLab-Train 和 LejuLab-Deploy,对Roban和Kuavo机器人进行强化学习训练与部署。
效果展示
| tasks | Isaac Lab | Mujoco | sim2real |
|---|---|---|---|
| roban_dance |  |
 |
 |
| kuavo_dance |  |
 |
 |
| roban_standup |  |
 |
 |
| roban_rl_walk |  |
 |
 |
📚 目录
- 📝 案例描述
- 🧩 框架图示
- 🔧 硬件配置
- 🤖 机器人强化学习训练全流程
- 🔗 机器人模型部署全流程
📝 案例描述
案例介绍如何使用乐聚的两个开源仓库 LejuLab-Train 和 LejuLab-Deploy,对Roban和Kuavo机器人进行训练与部署。
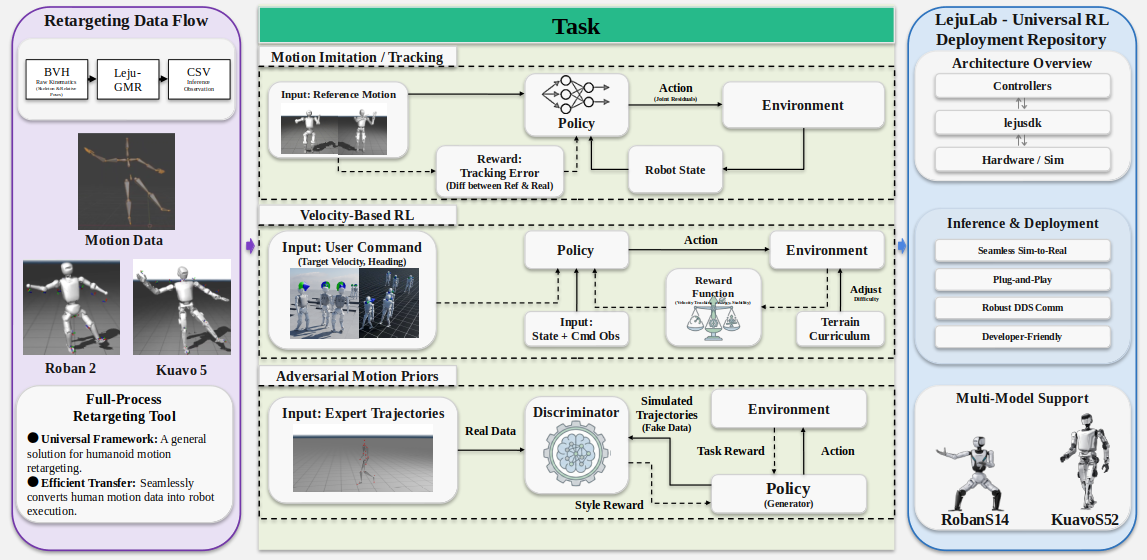
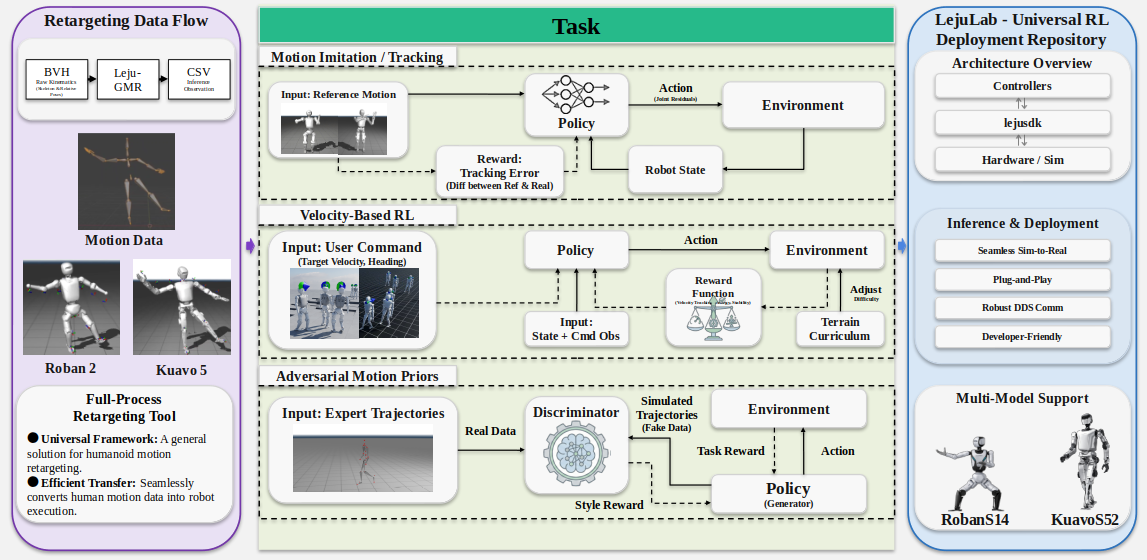
(1)LejuLab-Train 是一个基于 Isaac Lab 构建的综合性机器人仿真和强化学习框架。该框架为 Roban2 和 Kuavo 5 类人机器人提供了完整的开发工具链,包括动作数据处理、强化学习训练和仿真环境管理。其中包含两类任务:跟踪任务(动作模仿)和速度任务(运动控制)。
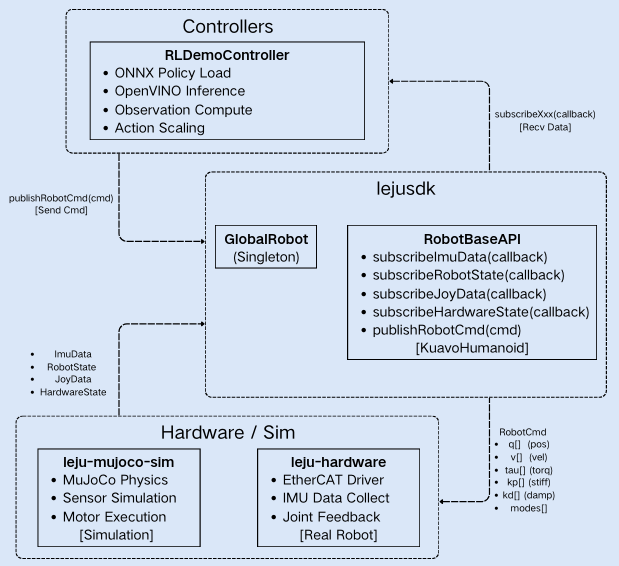
(2)LejuLab-Deploy 是乐聚机器人开发的人形机器人强化学习部署开发平台,为 Roban 和 Kuavo 系列人形机器人提供仿真与实物控制支持,帮助研究人员和开发者快速部署和测试机器人控制策略。
🧩 框架图示
🔧 硬件配置
-
机器人平台 :Roban 2 & Kuavo 5
-
算力平台(推荐配置):
-
GPU:NVIDIA GeForce RTX 4090 24G
-
Intel i9-14900KF
-
内存:64G
-
存储:2TB
-
🤖 机器人强化学习训练全流程
🎯 功能特性
-
多机器人支持:支持多种机器人模型(RobanS14、KuavoS54 等)
-
动作模仿:训练 RL 智能体模仿来自 NPZ 文件的参考动作
-
数据转换:在 CSV 和 NPZ 格式之间转换动作数据
-
动作回放:在 Isaac Sim 中可视化和回放动作序列
-
RL 训练:使用 RSL-RL 框架训练策略
-
灵活配置:支持本地动作文件和 WandB 注册表
⚙️ 环境要求
-
操作系统:Linux (推荐 Ubuntu 20.04, x86_64)
-
Python:>= 3.10
-
NVIDIA驱动:与 CUDA 版本兼容
-
CUDA:需要用于 GPU 加速(与Isaac Sim 版本兼容)
-
Isaac Sim:4.5.0
-
Isaac Lab:2.1.0
-
PyTorch:需要与 Isaac Lab 版本兼容
🌿 环境配置
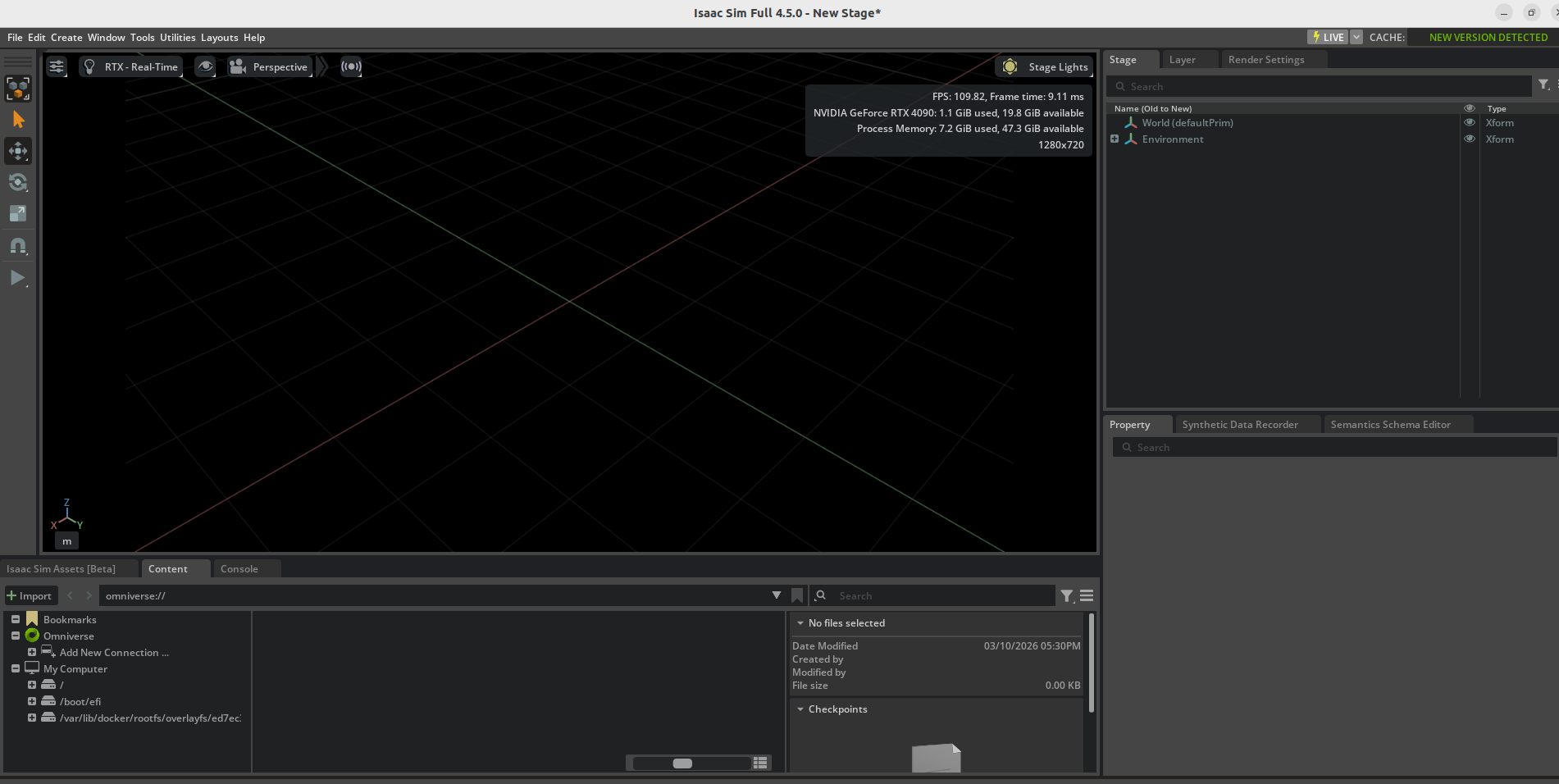
1. 安装 Isaac Sim 4.5.0
需要先手动下载NVIDIA Isaac Sim 4.5.0,安装步骤请参考官网,此处提供的步骤仅供参考。
# 安装 Isaac Sim 参考步骤
mkdir ~/rl_project && mkdir ~/rl_project/isaacsim # 也可以不创建rl_project,其他文件夹存放工程,后续将rl_project替换为您自己的工程文件夹名称即可
cd ~/Downloads
unzip "isaac-sim-standalone-4.5.0-linux-x86_64.zip" -d ~/rl_project/isaacsim
cd ~/rl_project/isaacsim
export ISAACSIM_PATH="${HOME}/rl_project/isaacsim"
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
${ISAACSIM_PATH}/isaac-sim.sh
初次运行需要加载全部组件,请耐心等待,直到窗口弹出这一步完成,可以结束该进程。
2. 配置 Isaac Lab 2.1.0
安装步骤请参考官网,此处提供的步骤仅供参考。
# 安装 Isaac Lab 参考步骤
cd ~/rl_project
git clone https://github.com/isaac-sim/IsaacLab.git
cd IsaacLab
git checkout v2.1.0
ln -s ../isaacsim _isaac_sim # 建立软链接 ln -s path_to_isaac_sim _isaac_sim
./isaaclab.sh --conda rl_project
conda activate rl_project
./isaaclab.sh --install
后续脚本需在 Isaac Lab 正确安装并激活的 Conda 环境中执行。
3. 获取训练代码库
pip install "numpy>=1.19.5,<2"
git clone https://gitee.com/leju-robot/LejuLab-Train.git
cd LejuLab-Train
cd source/leju_robot
pip install -e . # 以“可编辑模式”安装当前目录中的Python包
4. 配置 IDE 类型检查(可选但推荐)
为了在 VS Code/Pyright 中获得正确的 IDE 支持(自动补全、类型检查),您需要在 pyproject.toml 中配置 extraPaths:
[tool.pyright]
extraPaths = [
"/path/to/IsaacLab2.1/source/isaaclab",
"/path/to/IsaacLab2.1/source/isaaclab_assets",
"/path/to/IsaacLab2.1/source/isaaclab_mimic",
"/path/to/IsaacLab2.1/source/isaaclab_rl",
"/path/to/IsaacLab2.1/source/isaaclab_tasks",
"/path/to/IsaacLab2.1/IsaacLabExtensionRoban/source/amp-rsl-rl",
"/path/to/IsaacLab2.1/IsaacLabExtensionRoban/source/ext_kuavo",
"/path/to/isaac-sim-4.5/exts/omni.isaac.ml_archive/pip_prebundle",
]
为什么需要这个配置?
-
这些路径指向 Isaac Lab 的源代码包,它们不是作为标准 Python 包安装的;
-
Pyright(VS Code 的类型检查器)需要这些路径来解析导入并提供自动补全;
-
没有此配置,您可能会在 IDE 中看到导入错误和缺少类型提示;
-
重要:请更新路径以匹配您实际的 Isaac Lab 安装目录。
-
注意:此配置仅影响 IDE 类型检查,不会影响运行时执行。实际的导入在运行时可以正常工作,因为 Isaac Lab 包在执行时被添加到
PYTHONPATH中。
🧠 训练方法
1. 数据预处理(CSV 转 NPZ)
将动作捕捉数据经由GMR处理后,得到包含机器人base_link全局位姿和关节角度数据的 csv 格式数据,本工程提供将 csv 格式数据通转换为数据信息更丰富的 npz 格式的脚本,同时生成部署所用的 csv 数据。若设备性能不够高,不建议去掉参数--headless,否则将严重卡顿,低配 GPU 或 CPU 运行时必须使用--headless。
python scripts/motion_tool/"csv_to_npz&deploycsv.py" \
--input_file path/to/motion.csv \
--input_fps 30 \
--output_fps 50 \
--robot robanS14 \
--npz_output output/motion.npz \
--csv_output output/motion_deploy.csv
--headless
参数说明:
-
--input_file: 输入 CSV 文件路径(必需) -
--input_fps: 输入动作的帧率(默认:30) -
--output_fps: 输出动作的帧率(默认:50) -
--frame_range START END: 可选,要提取的帧范围 -
--npz_output: 输出 NPZ 文件路径 -
--csv_output: 可选的部署 CSV 输出路径 -
--robot: 机器人型号名称(默认:robanS14) -
--headless: 无 GUI 运行 -
--input_quat_xyzw: 输入CSV的四元数列是xyzw,转换为wxyz;不传参则默认输入已经是wxyz(若输出npz出现机器人方向倒置,使用此参数)
2. 验证动作回放
在开始训练前,请先测试转换后的动作数据是否能正确回放。
python scripts/motion_tool/replay_npz.py \
--motion_file path/to/motion.npz \
--robot robanS14
参数说明:
-
--motion_file: NPZ 动作文件路径 -
--robot: 机器人型号名称(robanS14、kuavoS54)
3. 训练RL智能体
3.1 轨迹模仿任务
3.1.1 舞蹈任务
python scripts/reinforcement_learning/rsl_rl/train.py \
--task Tracking-New-Year-Dance-Flat-RobanS14 \
--motion_file source/leju_robot/leju_robot/assets/motion_data/mimic/npz_data/robanS14_new_year_dance_50fps.npz \
--num_envs 8192 \
--headless \
--max_iterations 25000
# roban的舞蹈任务包含 charleston、 new_year 舞蹈。
# --task Tracking-Dance-Flat-RobanS14
# --motion_file source/leju_robot/leju_robot/assets/motion_data/mimic/npz_data/robanS14_charleston_dance_50fps.npz
python scripts/reinforcement_learning/rsl_rl/train.py \
--task Tracking-Dance-Flat-KuavoS54 \
--motion_file source/leju_robot/leju_robot/assets/motion_data/mimic/npz_data/kuavos54_dance_50fps.npz \
--num_envs 8192 \
--headless \
--max_iterations 25000
# 该任务为 kuavo 5 的舞蹈任务。
3.1.2 倒地起身任务
python scripts/reinforcement_learning/rsl_rl/train.py \
--task Tracking-Standup-Flat-RobanS14 \
--motion_file source/leju_robot/leju_robot/assets/motion_data/mimic/npz_data/robanS14_prone_50fps.npz \
--num_envs 8192 \
--headless \
--max_iterations 25000
# roban的倒地起身任务包含 前倒地起身(prone)、后倒地起身(supine)。
# --motion_file source/leju_robot/leju_robot/assets/motion_data/mimic/npz_data/robanS14_supine_50fps.npz
3.2 速度跟踪任务
# 该类任务包含 roban 和 kuavo 的PPO Flat Walk
# roban
python scripts/reinforcement_learning/rsl_rl/train.py \
--task Velocity-Flat-RobanS14 \
--num_envs 8192 \
--headless \
--max_iterations 25000
# kuavo
python scripts/reinforcement_learning/rsl_rl/train.py \
--task Velocity-Flat-KuavoS54-Play \
--num_envs 8192 \
--headless \
--max_iterations 25000
⚠️注意:此处的 kuavo PPO Flat Walk 任务,请使用 pip install 方式安装 Isaac Sim和Isaac Lab。
参数说明:
-
--task: 任务名称(如Tracking-Dance-Flat-RobanS14、Velocity-Flat-RobanS14、Velocity-Rough-AMP-Walk-RobanS14),可以在init.py脚本中查看任务名称,示例目录如下source/leju_robot/leju_robot/tasks/tracking/config/robanS14/dance/init.py -
--motion_file: 参考动作 NPZ 文件路径(跟踪任务必需) -
--num_envs: 并行环境数量(请根据电脑配置合理选择) -
--max_iterations: 最大训练迭代次数 -
--headless: 无 GUI 运行 -
--resume: 从检查点恢复训练 -
--load_run: 要加载的检查点的运行 ID -
--checkpoint: 检查点文件名(如model_25000.pt)
🔍 验证模型
加载训练好的模型检查点,在 Isaac Lab 中进行演示,同时会生成可用于部署的.onnx文件。
python scripts/reinforcement_learning/rsl_rl/play.py \
--task Tracking-Dance-Flat-RobanS14-Play \
--motion_file assets/motion_data/your_task_type/npz_data/{motion_name}.npz \
--load_run your_date_and_time \
--checkpoint model_25000.pt \
--num_envs 1
参数说明:
-
--task: 任务名称,需带-Play后缀 -
--motion_file: 参考动作文件的路径,格式为 .npz,用于指定机器人需要模仿的动作序列。 -
--load_run: 训练日志中的运行 ID -
--checkpoint: 检查点文件名 -
--num_envs: 环境数量(通常为 1 ,用于可视化)
⚙️ 使用 VS Code Debug 配置(可选但推荐)
项目在 .vscode/launch.json 中包含了预配置的 VS Code 调试配置,可以一键启动训练和测试任务。
使用方法:
1. 设置 Python 解释器
-
按
Ctrl+Shift+P(Mac 上为Cmd+Shift+P)打开命令面板 -
输入 "Python: Select Interpreter" 并选择
-
选择虚拟环境中的 Python 解释器(例如
venv/bin/python或conda envs/your_env/bin/python) -
或者点击 VS Code 右下角的 Python 版本,选择正确的解释器
-
此步骤是必需的 - VS Code 必须使用安装了 Isaac Lab 和项目依赖的相同 Python 环境
2. 在 VS Code 中打开项目
- 在项目根目录打开 VS Code
3. 进入运行和调试
-
按
F5或点击侧边栏的"运行和调试"图标 -
或使用菜单:
运行 > 启动调试
4. 从顶部下拉菜单中选择配置
-
动作工具:
-
csv to npz: 将 CSV 动作文件转换为 NPZ 格式 -
pkl to npz: 将 PKL 动作文件转换为 NPZ 格式 -
replay npz: 回放单个 NPZ 动作文件
-
-
训练配置:
-
train robanS14 walk: 训练 RobanS14 速度控制任务 -
train robanS14 dance: 训练 RobanS14 舞蹈跟踪任务 -
train robanS14 standup: 训练 RobanS14 站立跟踪任务 -
train kuavoS54 walk: 训练 KuavoS54 速度控制任务 -
train kuavoS54 dance: 训练 KuavoS54 舞蹈跟踪任务
-
-
运行配置:
-
play robanS14 walk: 测试训练好的 RobanS14 速度策略 -
play robanS14 dance: 测试训练好的 RobanS14 舞蹈策略 -
play robanS14 standup: 测试训练好的 RobanS14 站立策略 -
play kuavoS54 walk: 测试训练好的 KuavoS54 速度策略 -
play kuavoS54 dance: 测试训练好的 KuavoS54 舞蹈策略
-
5. 自定义参数
-
编辑
.vscode/launch.json以修改参数 -
取消注释/注释行以启用/禁用选项
-
更新运行配置中的
--load_run和--checkpoint
提示:
-
在代码中设置断点进行调试
-
训练时使用
--headless标志以无 GUI 模式运行(更快) -
根据 GPU 内存调整
--num_envs -
对于运行配置,使用您的训练运行 ID 更新
--load_run
📋 可用任务
跟踪任务(动作模仿):
Tracking-Dance-Flat-RobanS14/Tracking-Dance-Flat-RobanS14-PlayTracking-New-Year-Dance-Flat-RobanS14/Tracking-New-Year-Dance-Flat-RobanS14-PlayTracking-Standup-Flat-RobanS14/Tracking-Standup-Flat-RobanS14-PlayTracking-Dance-Flat-KuavoS54/Tracking-Dance-Flat-KuavoS54-Play
速度任务(运动控制):
-
Velocity-Flat-RobanS14/Velocity-Flat-RobanS14-Play -
Velocity-Flat-KuavoS54/Velocity-Flat-KuavoS54-Play
🪛 配置
机器人配置定义在:
source/leju_robot/leju_robot/tasks/{task_type}/config/{robot_name}/
每个机器人都有自己的配置,包括:
-
环境设置
-
MDP 组件(观测、奖励、事件等)
-
智能体配置
-
任务特定参数
🔗 机器人模型部署全流程
⬇️ 代码拉取
LejuLab-Deploy是乐聚人形机器人强化学习部署代码,代码框架如下。
git clone https://gitee.com/leju-robot/LejuLab-Deploy.git
🎮Sim to sim
在没有机器人运行环境的情况下,请使用docker环境进行编译和仿真使用(推荐)。
1. ✅前提条件
请正确安装 docker ,推荐新手使用该一键配置方法安装docker:
wget http://fishros.com/install -O fishros && . fishros
请正确安装 nvidia 显卡驱动和 nvidia-container-toolkit 并配置(如需使用GPU)。请参考 NVIDIA 官方文档 安装与显卡驱动版本相匹配的nvidia-container-toolkit 。
2. 🐳下载镜像并进入 docker container
请下载已经编译好的镜像:
https://kuavo.lejurobot.com/kuavo_research_editiion/docker_images/kuavo_opensource_mpc_wbc_img_v1.3.0.tar.gz
执行以下命令导入容器镜像:
docker load -i kuavo_opensource_mpc_wbc_img_v1.3.0.tar.gz
进入 docker container :
cd LejuLab-Deploy # 具体路径请根据你下载的仓库所在
git checkout -b beta origin/beta # 切换至 beta 分支
./docker/run_with_gpu.sh # 使用 GPU 运行 或 ./docker/run.sh 使用cpu
3. 📦 依赖安装
sudo apt-get update && sudo apt-get install -y \ # 依赖安装
build-essential cmake \
libacl1-dev libncurses5-dev
4. ⚒️ 编译
容器镜像内部默认使用zsh。
source installed/setup.zsh # !!! IMPORTANT !!! 非常重要,不可省略
catkin build
5. ⚡ 部署 iceoryx 共享内存(首次使用需执行)
项目支持通过 iceoryx 共享内存加速进程间通信,建议部署以获得更优的实时性能。
./src/leju_launch/scripts/setup_cyclonedds_config_for_docker.sh
6. 📄 配置文件
6.1 添加模型文件
sim2sim 和 sim2real 模型部署流程相似。请将部署需要的 csv 文件和训练得到的 onnx 文件添加到对应路径,此处以 robanS14 为例。
# csv 文件放置路径
LejuLab-Deploy/src/leju-controllers/leju-rl-controller/config/14/motion_data/
# onnx 模型文件放置路径
LejuLab-Deploy/src/leju-controllers/leju-rl-controller/config/14/policy
6.2 配置 yaml 配置文件
该配置文件指定模型路径、部署 CSV 路径、关节映射与 PD 参数等,可以使用已有配置文件进行部署,或参考该文件创建自己的部署配置。
LejuLab-Deploy/src/leju-controllers/leju-rl-controller/config/<robot_version>/路径下创建配置文件,例如创建config_mimic_hpny_dance_sim.yaml 配置文件。
修改配置文件中 onnx 模型路径、csv 轨迹路径:
# ONNX 策略模型路径(相对于此配置文件)
policy_path: "policy/<onnx_name>.onnx"
# csv 运动数据路径
motion_data_path: "motion_data/<csv_name>.csv"
# Motion 数据配置
motion:
default_motion: "hpny_dance" # 默认动作名称(启动时加载)
motions: # 命名的动作数据文件
- name: "hpny_dance" # 动作名称
file: "motion_data/<csv_name>.csv"
sim2sim 的参数需要修改为和训练模型输出的params/env.yaml一致。配置文件中的 joint_default_pos 与 env.yaml中的 joint_pos 对齐; actuator_kp 与 stiffness 对齐; actuator_kd 与 damping 对齐;action_scale 与 actions 对齐。
sim2real 参数在对齐的基础上,请根据机器人实机效果进行微调。
actuator_kp:
[ 100.0,
#...
actuator_kd:
[ 100.0,
#...
action_scale:
[ 0.49,
#...
6.3 修改 controller_manager.yaml
该文件是控制器配置文件,以robanS14为例,路径是LejuLab-Deploy/src/leju-controllers/leju-rl-controller/config/14/controller_manager.yaml,其中default_controller字段是默认控制器,调整时可修改其为其他配置对应的name,config字段是 6.2 创建的 yaml 文件。
loop_dt: 0.001
default_controller: "hpny_dance" # 可将其修改为 dance_demo
# 贺年舞蹈
- name: "hpny_dance"
type: "GenericRLController"
config: "config_mimic_hpny_dance_sim.yaml"
enabled: true
# 舞蹈案例
- name: "dance_demo"
type: "GenericRLController"
config: "config_dance_demo.yaml"
enabled: true
7. ▶️ 运行
source devel/setup.zsh
# Roban 2
export ROBOT_VERSION=14
roslaunch leju_launch load_mujoco_sim.launch
# Kuavo 5
export ROBOT_VERSION=54
roslaunch leju_launch load_mujoco_sim.launch
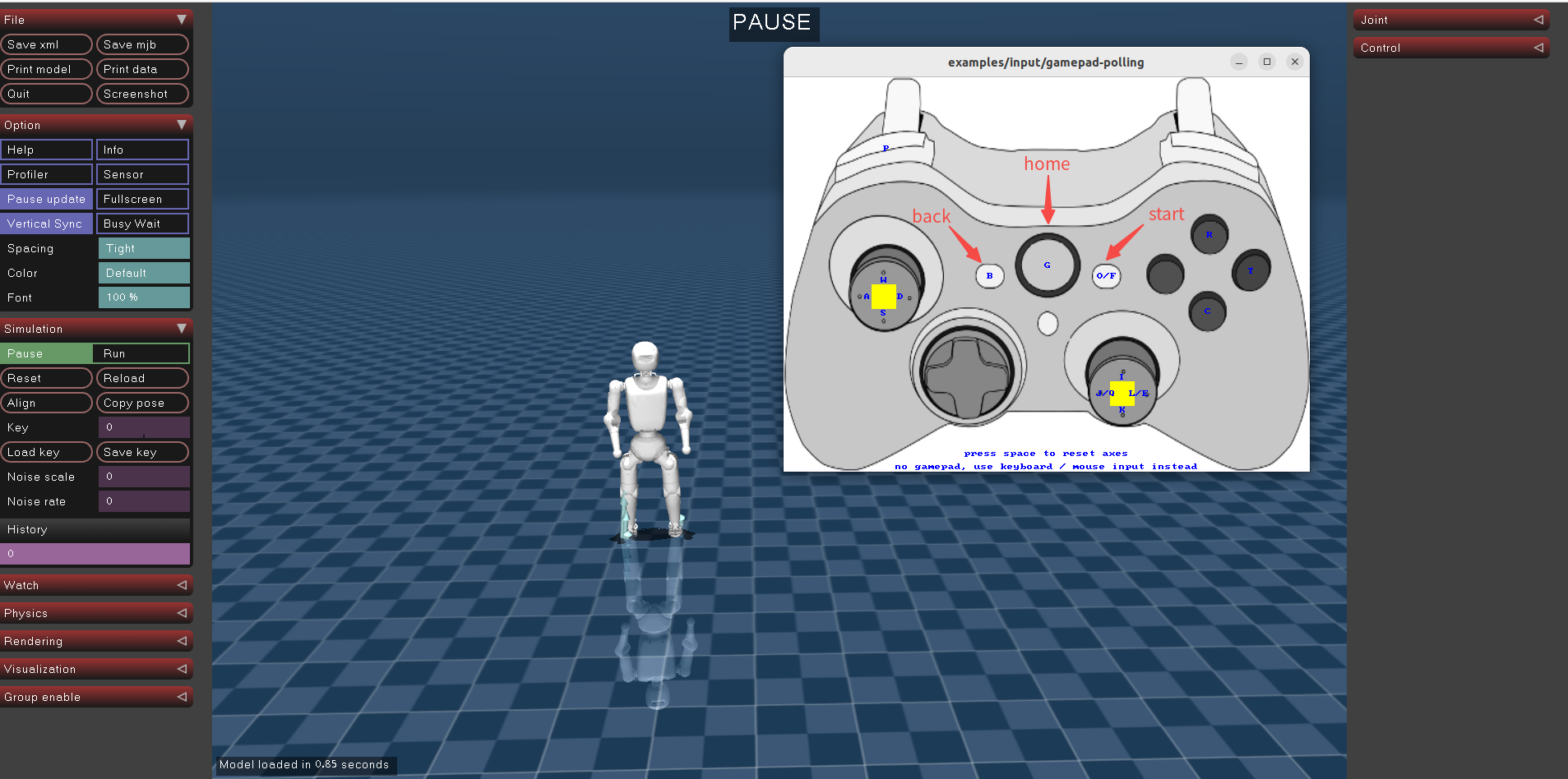
-
通过如上命令启动控制器、Mujoco 仿真器和手柄控制等功能包
-
根据终端提示,按下手柄的
start按键 -
点击 Mujoco 仿真中的
Run运行按钮,跳舞时点击手柄的西瓜键/home,行走时请控制手柄进行移动 -
tips: 如果开始时机器人倒地,可以先
Pause和Reset仿真,然后再Run
🔄 Sim to real
1. 📦 依赖安装
sudo apt-get update && sudo apt-get install -y \ # 依赖安装
build-essential cmake \
libacl1-dev libncurses5-dev
2. ⚒️ 编译
cd LejuLab-Deploy # 具体路径请根据你下载的仓库所在
git checkout -b beta origin/beta # 切换至 beta 分支
source installed/setup.bash # !!! IMPORTANT !!! 非常重要,不可省略
catkin build
3. ⚡ 部署 iceoryx 共享内存(首次使用需执行)
./src/leju_launch/scripts/setup_cyclonedds_config.sh
4. 📄 修改配置文件
该部分为通用教程,已在 sim 2 sim 陈述。
5. ▶️ 运行
sudo su # 需要 root 权限
source devel/setup.bash
# Roban 2
export ROBOT_VERSION=14
roslaunch leju_launch load_real.launch
# Kuavo 5
export ROBOT_VERSION=54
roslaunch leju_launch load_real.launch
-
对于实物机器人,也许您首先需要对电机进行零点标定,但这并不是必须的,因为机器人在出厂时已经标定完毕,如果存在如下情况您可手动执行标定工具重新进行标定:
-
准备站立时,发现关节角度与零点位置位置存在偏差
-
硬件维修更换电机
-
-
电机零点标定工具参考文档:电机零点标定工具
-
拉起机器人背后的急停按钮,执行上述命令
-
将移位架升起,等待机器人进入初始准备姿势
-
降低移位架,让机器人脚掌刚刚好接触地面
-
使用手柄
start按键使机器人站立,随后再点击手柄的西瓜键/home进行跳舞,若是行走模型请控制手柄进行移动 -
结束使用机器人请按手柄
back按键
通用说明
-
选择机器人版本(数值定义参考
lejusdk-utils/robot_version.hpp中RobotVersions常量)-
export ROBOT_VERSION=14:Roban 2 代 -
export ROBOT_VERSION=54:Kuavo 5 代
-
-
手柄控制(通用)
-
start:从待机/准备状态切换到运行/站立状态 -
back:进入安全停机/关节松弛状态 -
其他按键和摇杆:根据不同控制器(如 RL demo / mimic)实现行走、转向、舞蹈等功能,详见对应控制器文档
-
-
控制器配置
- 控制器配置文件位于
src/leju-controllers/leju-rl-controller/config/<ROBOT_VERSION>/controller_manager.yaml,通过修改default_controller字段切换控制模式,待机器人站立之后,按下西瓜键即可播放舞蹈,播放结束后再次按西瓜键可重复播放。
- 控制器配置文件位于
