
基于kuavo机器人的导航demo

硅基生命训练师
本demo同时适配kuavo4与kuavo5
调试本demo需要一定的基础,如ROS、navigation、坐标变换、点云处理等
1. 系统概述
本demo是基于KUAVO导航解决方案,可以实现:
这仅仅是示例,还有一些局限性,比如建图时对于动态障碍物的处理并不好,会把动态障碍物经过的路线识别成障碍物,所以建图时尽量在静态场景,对于地图中的噪点可以通过地图编辑解决。
代码只能部署到机器人上位机
- 🗺️ 自动建图:扫描环境并生成地图
- 📍 定位:在地图中确定机器人的位置
- 🚀 自主导航:自动规划路径并避开障碍物到达目标,在导航时可以动态避障
1.1 KUAVO使用介绍(必读)
本demo面向KUAVO实机(kuavo4/kuavo5)+ Livox MID360,在机器人上位机直接运行。
robot_version 用于区分 KUAVO 不同版本上的雷达安装方向,驱动和FAST-LIO会按该参数切换对应配置:
- kuavo4:
robot_version=45或49 - kuavo5:
robot_version=52 robot_version=45或49:使用MID360_config.json+mid360.yamlrobot_version=52:使用MID360_config_52.json+mid360_52.yaml
默认参数为 robot_version=45(兼容45/49安装方向),因此 kuavo4 常规使用可以不传该参数。
只有 kuavo5(52安装方向)需要显式传 robot_version:=52。
常见参考坐标系说明:
camera_init:FAST-LIO启动时建立的全局参考系body:机器人本体参考坐标系livox_frame:雷达坐标系odom:里程计坐标系(本demo中通过静态TF与camera_init关联)
1.2 快速使用路径
- 建图:
roslaunch kuavo_nav_demo kuavo_build_map.launch - 保存地图:
roslaunch kuavo_nav_demo save_pgm_map_auto_fix.launch - 导航:
roslaunch kuavo_nav_demo kuavo_nav_test.launch
仅 kuavo5(52安装方向)需要在建图和导航命令后追加
robot_version:=52。
1.3 系统主要特点
✅ 开箱即用:预配置好的参数,新手也能快速上手
✅ 功能完整:从建图到导航的一站式解决方案
✅ 实时处理:基于FAST-LIO的SLAM算法
✅ 基于雷达纯定位:只用关注body的坐标,不用关注机器人本身在地图上的坐标
2. 环境准备
需要使用远程桌面运行程序,方便查看效果,和实现导航
安装依赖:
pip3 install open3d==0.16.0
pip3 install watchdog==4.0.2
sudo apt-get install libsdl-image1.2-dev
# 上位机若为NX或AGX即用户名为leju_Kuavo,执行下面一行命令,反之不用
sudo apt install ros-noetic-tf2-sensor-msgs
拉取代码并编译:
cd ~/kuavo_ros_application
git pull
git checkout opensource/navigation_demo
cd ~/kuavo_ros_application/src/navigation_opensource
catkin build
source devel/setup.bash
3. 硬件连接
3.1 连接Livox激光雷达
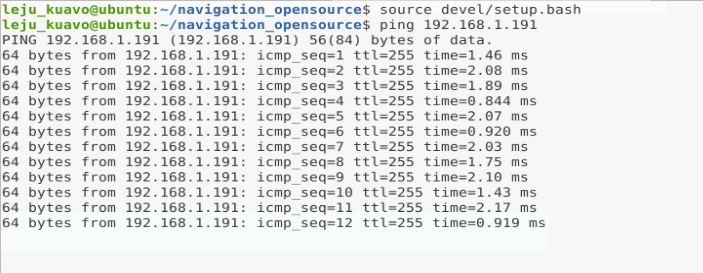
步骤1:测试连接
# 测试网络连通性
ping 192.168.1.191 # 出厂设置,需要确认没问题
# 如果无法ping通,检查:
# 1. 有线是否连接正常
# 2. IP地址是否在同一网段
# 3. 激光雷达是否正常供电
正常连接输出:
4. 建图操作
4.1 基础建图流程
步骤1:启动建图系统
# 进入工作空间
cd ~/kuavo_ros_application/src/navigation_opensource
source devel/setup.bash
# 启动基础建图
roslaunch kuavo_nav_demo kuavo_build_map.launch
仅 kuavo5(52安装方向)需要改为
roslaunch kuavo_nav_demo kuavo_build_map.launch robot_version:=52。
注意:这里后续定位是使用pcd地图,PCD默认是$(find fast_lio)/PCD/scans.pcd(通常为~/kuavo_ros_application/src/navigation_opensource/src/FAST_LIO/PCD/scans.pcd)。启动并关闭建图程序后该文件会被自动生成并覆盖。若要保留既有定位地图,请在建图前先备份这个scans.pcd。
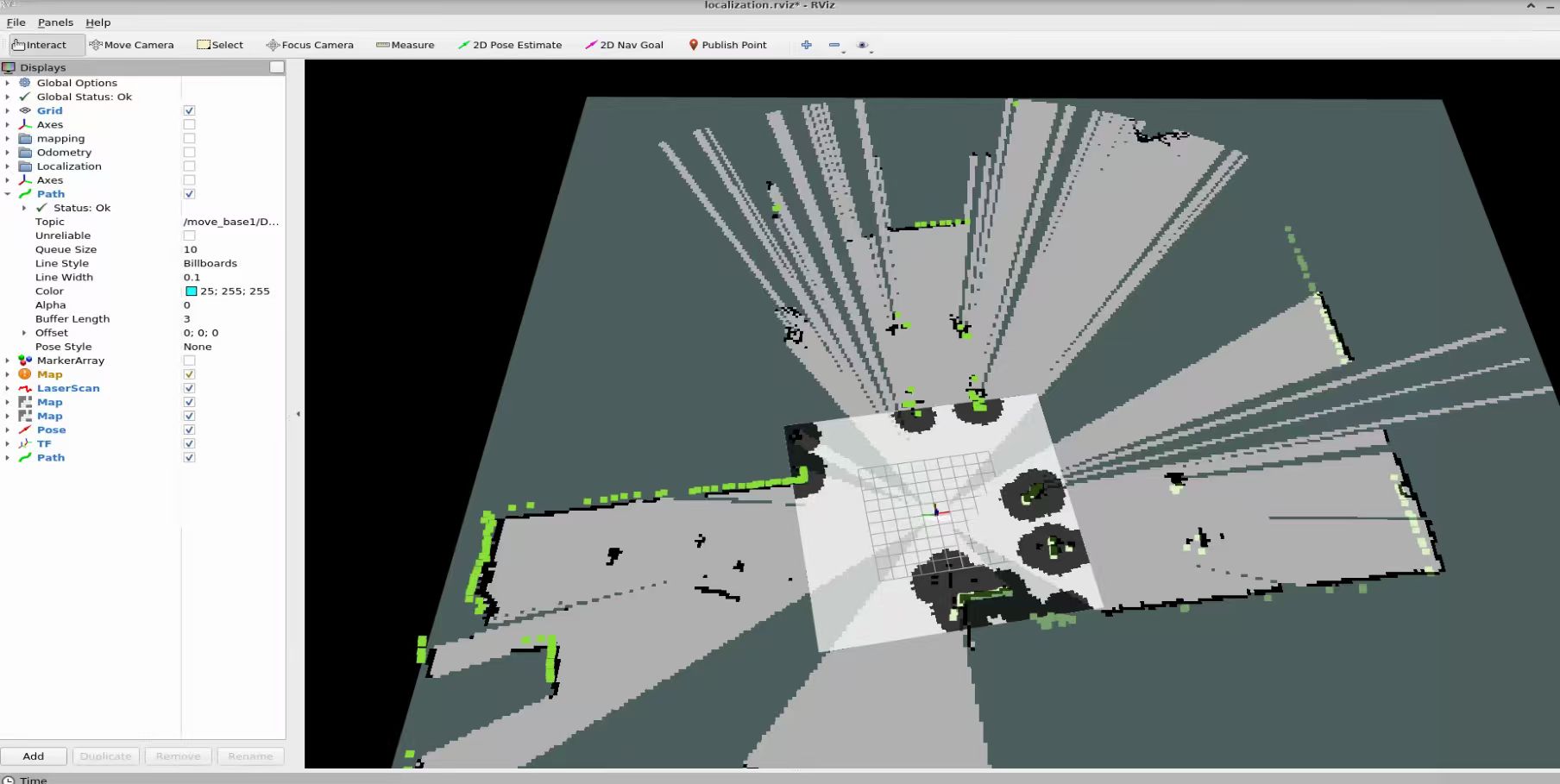
步骤2:观察建图效果
- 打开RViz可视化界面
- 观察点云地图的构建过程
- 确认激光雷达数据正常
步骤3:控制机器人移动
- 使用遥控器或键盘控制机器人
- 建议速度:0.1-0.4 m/s
- 避免快速转弯和急停
也可以挂着机器人建图(不启动机器人), 让机器人处于使能状态,能确保头部角度保持水平不变 (推荐)
步骤4:完成建图
- 覆盖整个目标区域
- 确保地图质量正常
- 保存地图数据
效果如下图:
4.4 保存地图
自动保存
cd ~/kuavo_ros_application/src/navigation_opensource
source devel/setup.bash
# 启动自动保存
roslaunch kuavo_nav_demo save_pgm_map_auto_fix.launch
若未出现报错,现在可以关闭建图相关终端和程序
5. 地图编辑
5.1 为什么需要编辑地图?
建图过程中可能会包含:
- 🚶 动态障碍物(行人、车辆)
- 🗑️ 临时物体(垃圾桶、椅子)
- 🌫️ 环境干扰 (场景中包含玻璃等反光性强的物品)
5.2 编辑前准备(建议先做)
- 确保地图文件成对存在:
xxx.pgm与xxx.yaml必须在同一路径下。 - 先备份原图,避免误操作后无法恢复:
cd ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/maps
cp test_map.pgm test_map_backup.pgm
cp test_map.yaml test_map_backup.yaml
- 若使用
ros_map_editor,先安装依赖:
sudo apt install python3-pyqt5 python3-pil python3-yaml
5.3 使用图像编辑软件(推荐)
安装编辑工具:
# 安装KolourPaint(推荐)
sudo apt install kolourpaint
# 或安装GIMP
sudo apt install gimp
编辑地图:
# 打开地图文件
kolourpaint ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/maps/test_map.pgm
编辑技巧:
- 🟦 白色区域:空闲空间(机器人可以通行)
- ⬛ 黑色区域:障碍物(机器人不能通过)
- ⬜ 灰色区域:未知区域(机器人谨慎通行)
- 🖌️ 橡皮:擦除错误障碍物
- 🖌️ 黑色画笔:添加障碍物
- 建议不要修改图像分辨率和画布尺寸,否则可能导致导航比例失真。
5.4 使用ROS地图编辑器(MapEditor.py)
启动ROS地图编辑器:
# 进入编辑器目录
cd ~/kuavo_ros_application/src/navigation_opensource/src/ros_map_editor
# 启动编辑器
python3 MapEditor.py ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/maps/test_map.pgm
# 也可不带后缀
# python3 MapEditor.py ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/maps/test_map
编辑器常用操作:
Color=alternate:左键单击按白 -> 黑 -> 灰 -> 白循环切换Color=occupied:左键拖动涂黑(占据,像素值0)Color=unoccupied:左键拖动涂白(空闲,像素值255)Color=uncertain:左键拖动涂灰(未知,像素值200)- 点击
Save会覆盖当前.pgm文件;.yaml不会自动修改 Zoom可调显示倍率,便于细节修补
5.5 地图质量检查与回归验证
编辑完成后,请检查:
- ✅ 地图边界是否完整
- ✅ 障碍物是否准确
- ✅ 是否有明显错误
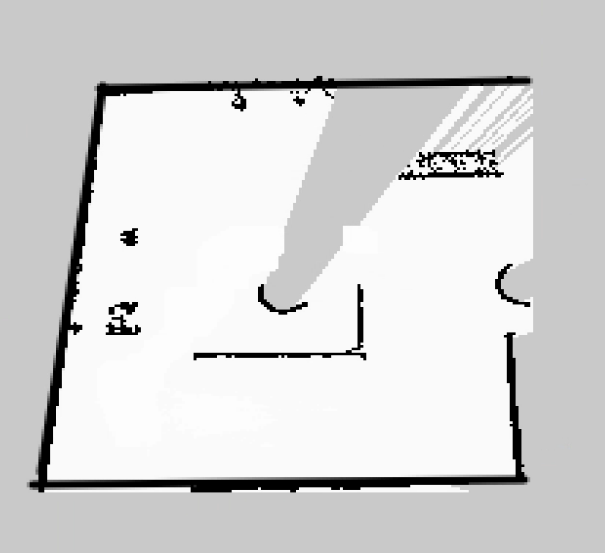
编辑示例:
编辑前:

编辑后:
6. 定位导航
6.0 KUAVO实机启动前检查
- 机器人本体已上电并处于可控状态
- MID360网络可达(
ping 192.168.1.191) - 地图文件已生成并可被定位模块读取
6.1 启动实物导航系统
需要先启动机器人
方法1:一键启动(推荐)
cd ~/kuavo_ros_application/src/navigation_opensource
source devel/setup.bash
# 启动完整导航系统
roslaunch kuavo_nav_demo kuavo_nav_test.launch
仅 kuavo5(52安装方向)需要改为
roslaunch kuavo_nav_demo kuavo_nav_test.launch robot_version:=52。
6.2 设置初始位姿
在RViz中设置:
- 打开RViz界面
- 点击顶部工具栏的"2D Pose Estimate"按钮
- 在地图上点击并拖动,设置机器人的初始位置和朝向
- 确认位姿准确
是否可以生效判据(重要):
- 初始化定位要看到终端输出
Waiting for initial pose....才可以初始化(该日志通常是黄色字体,比较显眼),大概等30s会自动弹出。 - 建议先确认有这条提示,再在RViz发送
2D Pose Estimate。
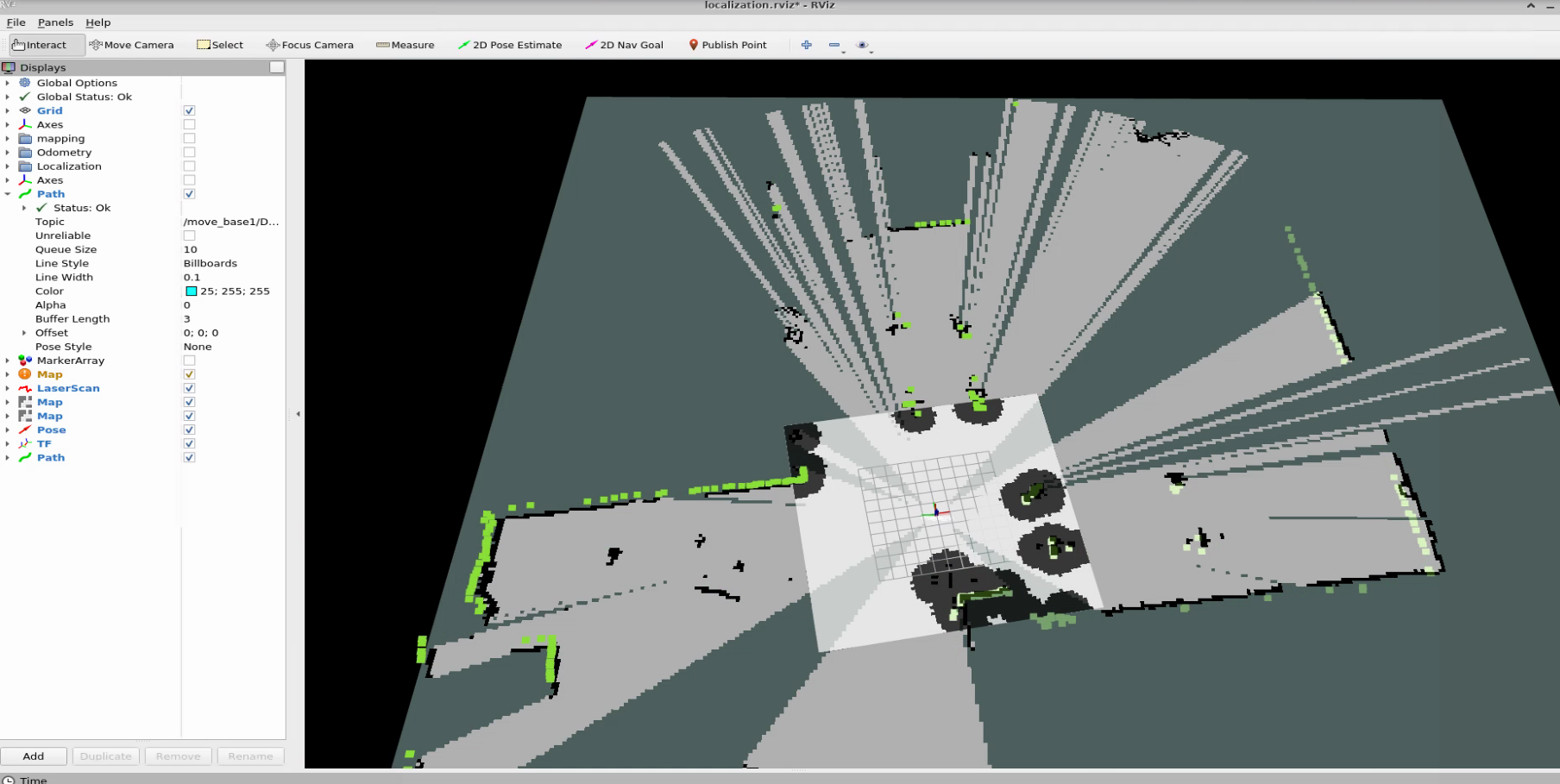
初始化前:
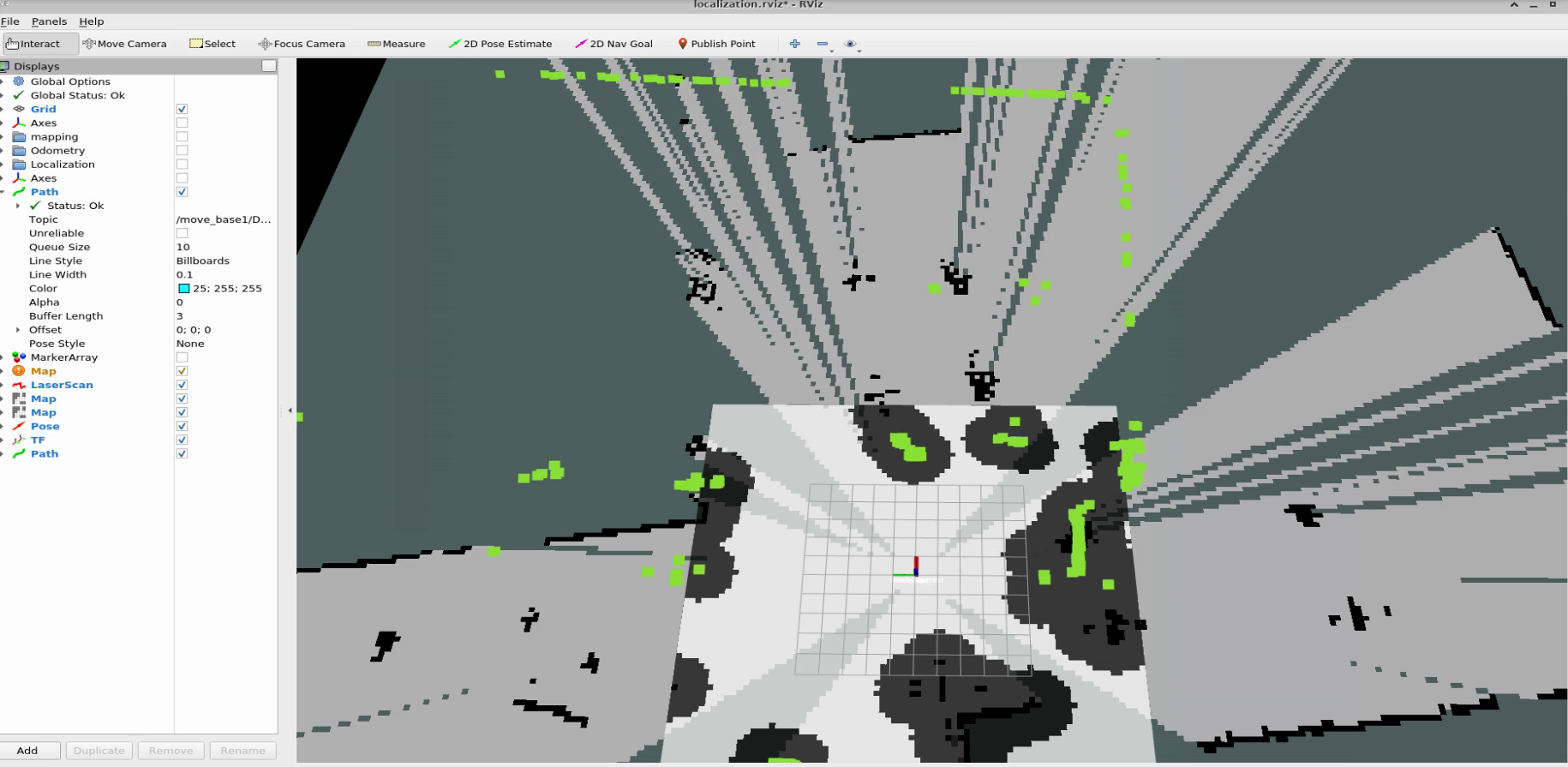
初始化后:
6.3 设置导航目标
在RViz中设置:
- 点击顶部工具栏的"2D Nav Goal"按钮
- 在地图上点击并拖动,设置目标位置和朝向
- 机器人将自动规划路径并开始导航
6.4 监控导航状态
主要话题说明:
- /Odometry (
nav_msgs/Odometry)- 由fastlio发布的里程计信息
- /localization (
nav_msgs/Odometry)- 融合后的全局定位结果,由transform_fusion.py发布。其位姿信息为map→body的变换,供导航等模块使用。
- /move_base/result (
move_base_msgs/MoveBaseActionResult)- 导航结果(成功/失败)。
- /move_base/status (
actionlib_msgs/GoalStatusArray)- 当前所有导航目标的状态。
- /move_base_simple/goal (
geometry_msgs/PoseStamped)- RViz中设置的导航目标点。
查看导航状态:
# 查看导航状态
rostopic echo /move_base/status
# 查看速度命令
rostopic echo /cmd_vel
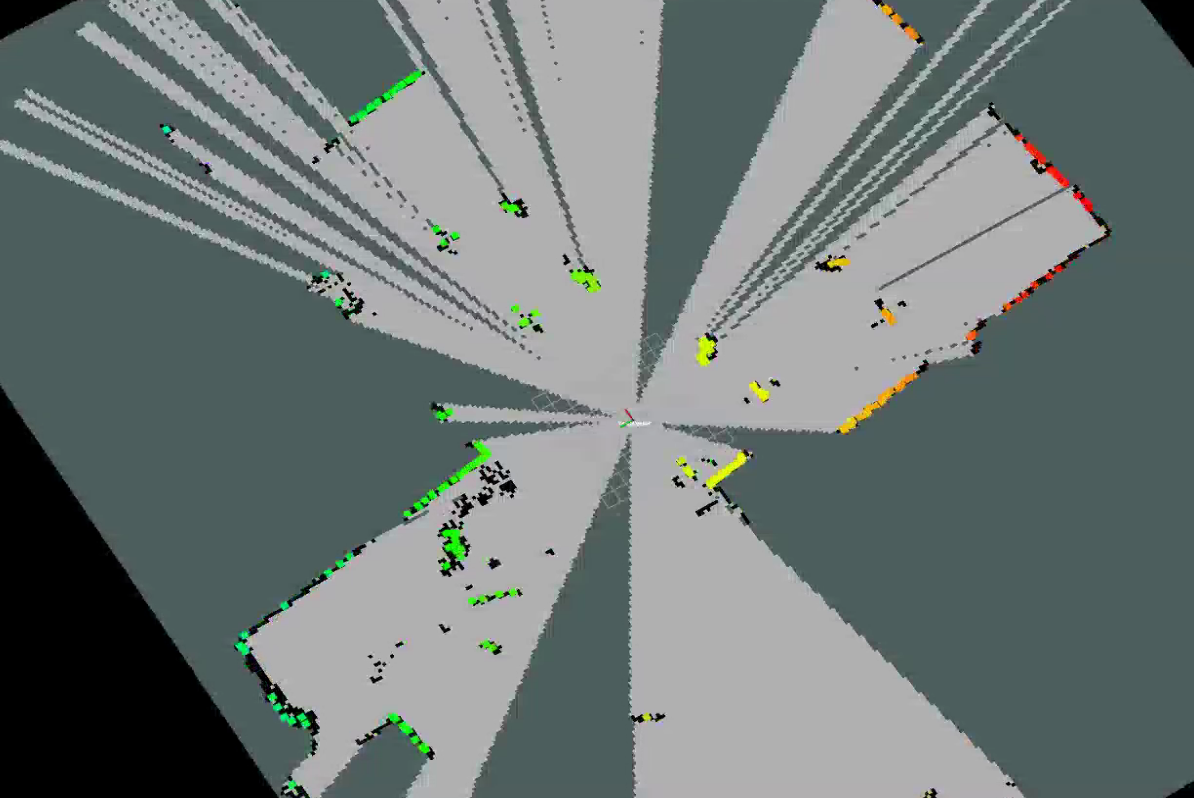
RViz可视化:
- 🟢 绿色路径:全局规划路径
- 🔵 蓝色路径:局部规划路径
6.5 导航参数调整
调整速度参数:
# 编辑速度参数
vim ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/param/base_local_planner_params.yaml
常用参数:
TrajectoryPlannerROS:
max_vel_x: 0.5 # 最大前进速度 (m/s)
min_vel_x: 0.1 # 最小前进速度 (m/s)
max_vel_theta: 1.0 # 最大旋转速度 (rad/s)
min_in_place_vel_theta: 0.4 # 最小原地旋转速度
acc_lim_x: 0.5 # 前进加速度限制
acc_lim_theta: 0.5 # 旋转加速度限制
调整避障参数:
# 编辑代价地图参数
vim ~/kuavo_ros_application/src/navigation_opensource/src/kuavo_nav_demo/param/costmap_common_params.yaml
常用参数:
obstacle_range: 2.5 # 障碍物检测范围 (m)
raytrace_range: 3.0 # 射线追踪范围 (m)
inflation_radius: 0.55 # 障碍物膨胀半径 (m)
cost_scaling_factor: 10.0 # 代价缩放因子
6.6 导航失败时清理代价地图(推荐先做)
当出现“明明可通行但不出路径”或“局部规划器卡住”的情况,可先清理一次代价地图:
rosservice call /move_base/clear_costmaps "{}"
如果需要自动周期清理并重发目标,可使用仓库中的脚本:
cd ~/kuavo_ros_application/src/navigation_opensource
source devel/setup.bash
python3 src/kuavo_nav_demo/scripts/clear_costmaps.py
仿真导航
如果想研究机器人的规划算法建议使用仿真,不涉及雷达和定位
# 先启动仿真
cd ~/kuavo_ros_application/src/navigation_opensource
source devel/setup.bash
roslaunch kuavo_nav_demo kuavo_nav_test_sim.launch
7. 常见问题
7.1 建图问题
Q: 建图时点云飘移怎么办?
A:
- 确保激光雷达安装稳固
Q: 地图中出现大量噪点,或者出现太低高度的障碍物没有扫到?
A:
修改navigation_opensource/src/FAST_LIO/launch/Pointcloud2Map.launch中的pointcloud_min_z参数,将-0.5增大或减小。
- 启用高度滤波,设置合适的高度范围
- 使用地图编辑工具手动清除
Q: 将地面识别为障碍物?
A:
修改navigation_opensource/src/FAST_LIO/launch/Pointcloud2Map.launch中的max_range参数,将10减小。
- 雷达处于非水平状态,确保雷达状态保持水平
- 也可以根据实机安装角度,调整雷达外参中的
pitch(单位:度):
"extrinsic_parameter" : {
"roll": 180.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
}
对应文件:
/home/kyxmb/wt/kuavo_ros_application/src/navigation_opensource/src/livox_ros_driver2/config/MID360_config.json
- 例如 kuavo4 标准版本(头部不能转动)可将
pitch设为实测俯仰角,如15.0。 - 修改后需要重启雷达驱动与相关建图/定位节点;并确保建图和导航使用同一套外参配置,即需要重新建图才能去导航。
7.2 定位问题
Q: 初始定位不准确?
A:
- 确保提供了较为准确的初始位姿估计
- 在机器人静止状态下进行初始化
- 确保建图时头部角度和导航时角度一致
Q: 初始化定位一直不成功?
A:
- 先确认终端出现
Waiting for initial pose....,再在RViz发送2D Pose Estimate。 - 检查定位用
PCD是否被建图流程覆盖(默认文件:$(find fast_lio)/PCD/scans.pcd,即~/kuavo_ros_application/src/navigation_opensource/src/FAST_LIO/PCD/scans.pcd)。 - 若怀疑被覆盖,恢复备份
PCD后重启定位与导航模块再试。
Q: 定位过程中出现偏移?
A:
- 确保地图质量良好,特征丰富
- 检查激光雷达是否被遮挡
- 周围环境和建图时变化不大
7.3 导航问题
Q: 机器人无法规划路径?
A:
- 查看雷达和地图是否对齐,俯视和侧视去看!!!!!
- 检查地图中是否存在障碍物阻断路径
- 确保起点和终点都在可达区域
- 调整全局规划器参数,如
default_tolerance - 先执行一次
rosservice call /move_base/clear_costmaps "{}"后再重试目标点
Q: 机器人无法靠近目标点?
A:
- 增加
xy_goal_tolerance和yaw_goal_tolerance - 检查目标点周围是否有障碍物
- 调整局部代价地图参数
- 必要时清理代价地图:
rosservice call /move_base/clear_costmaps "{}"
7.4 系统错误
Q: 找不到激光雷达设备?
A:
- 检查网络连接和IP设置
- 确保激光雷达供电正常
Q: 点云方向或导航朝向明显不对?
A:
- 优先检查
robot_version是否与实机安装版本一致(45/49/52) - 确认驱动加载配置是否正确(
MID360_config.json或MID360_config_52.json) - 使用
rosrun tf tf_echo camera_init livox_frame检查姿态方向是否符合预期
🙏 致谢
本项目集成了来自各种开源项目的工作:
- FAST-LIO - 高性能LiDAR-惯性里程计
- FAST-LIO-LOCALIZATION - 基于FAST-LIO的定位框架
- Livox ROS Driver - Livox激光雷达驱动
- ROS Navigation Stack - ROS导航栈
- OctoMap - 八叉树地图库