

s52机器人mujoco仿真深度图像的问题

fnlish
2026-04-30 发布64 浏览 · 0 点赞 · 0 收藏
mujoco仿真中头部和手上的d435深度相机的深度数据有误,使用z_near=0.02, z_far=50.0解码之后的深度图像,探测约1m的目标显示像素值只有265,对应深度数据只有220mm,探测约2.4米目标显示距离只有440mm。
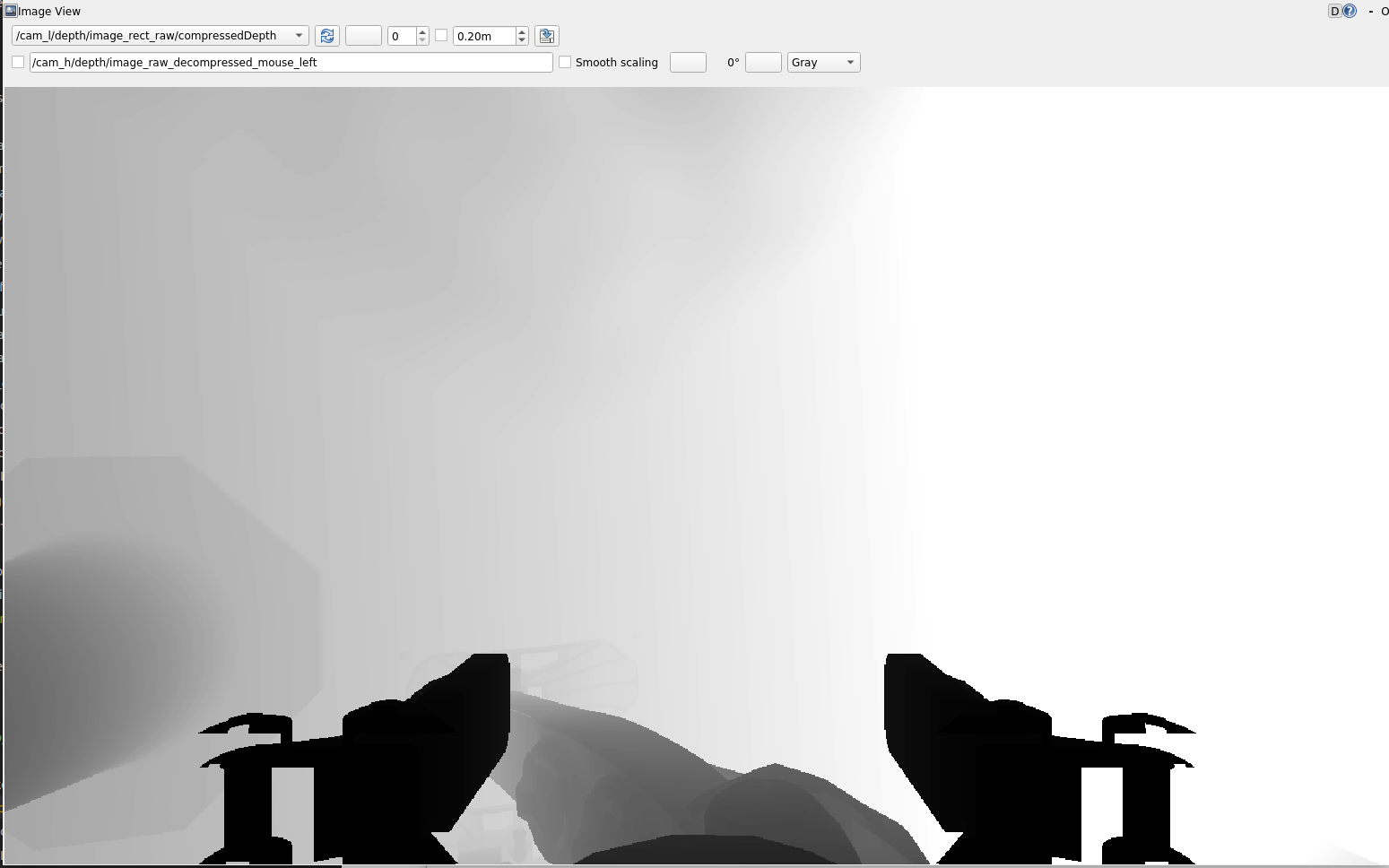
这是手部的相机看地面的效果,设置筛选距离0.2m,图片中可见机器人的脚,所以它探测到自己到地面的深度只有不到20cm,严重与实际情况不符。
又如下图中,mujoco中机器人头部相机距离绿色灯光约1m
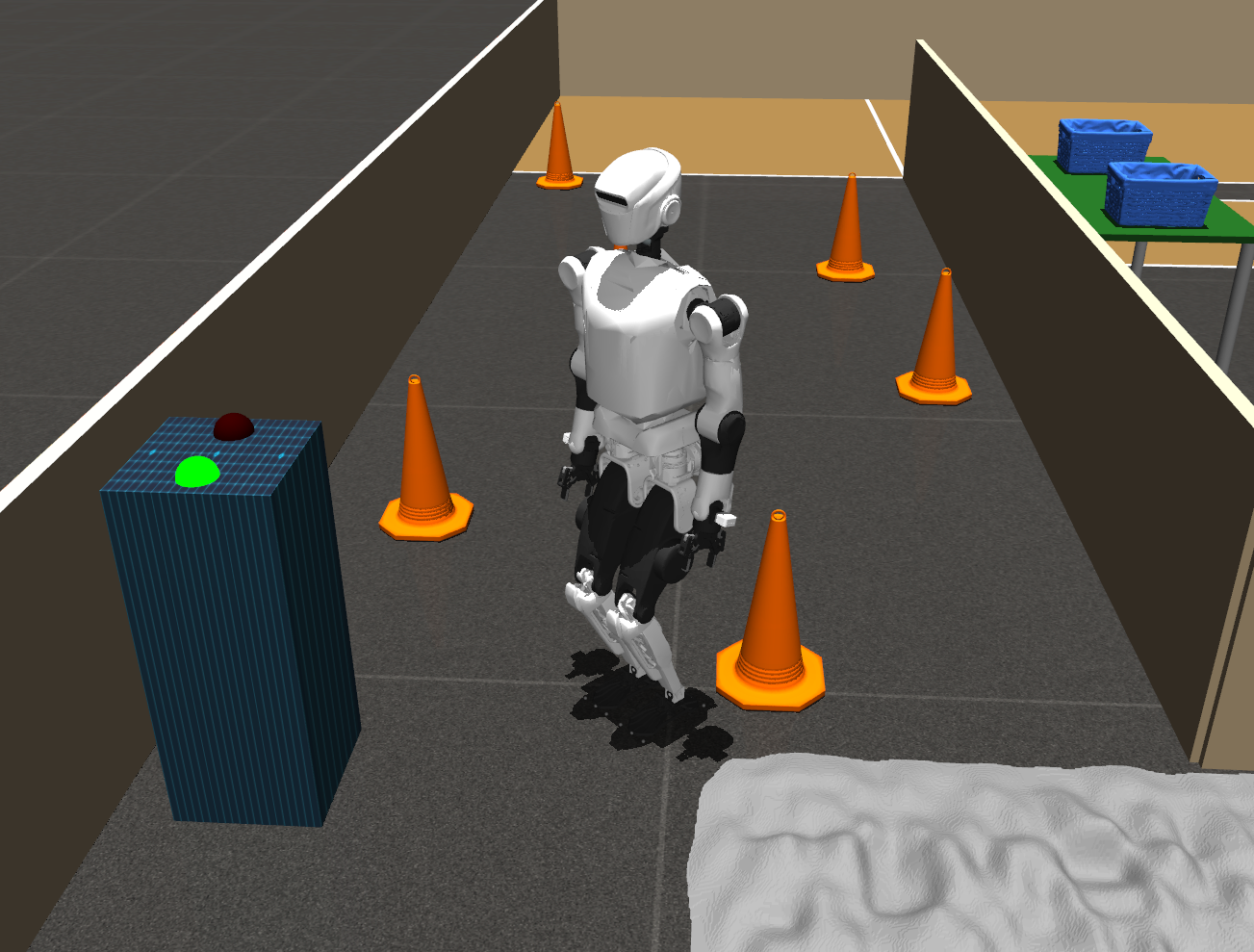
筛选距离为0.3m的深度图像如下
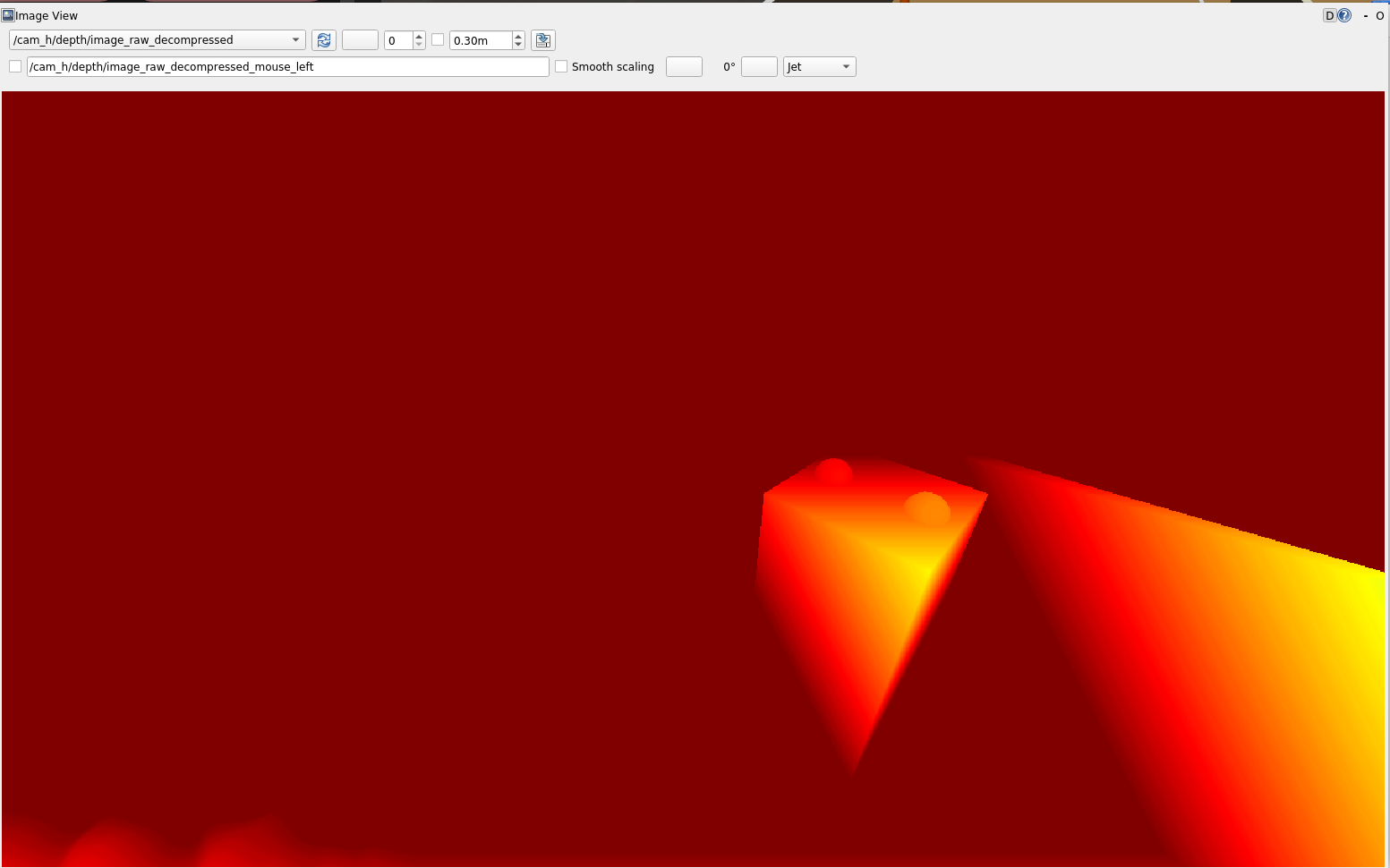
图像显示绿灯距离相机还不到0.3m,与实际情况不符。
望解答。
请前往 登录/注册 即可发表您的看法…