s52机器人mujoco仿真深度图像的问题
mujoco仿真中深度图像测距存在问题,测量实际1m的物体,显示深度只有20cm
![s52机器人mujoco仿真深度图像的问题]() 203 次阅读
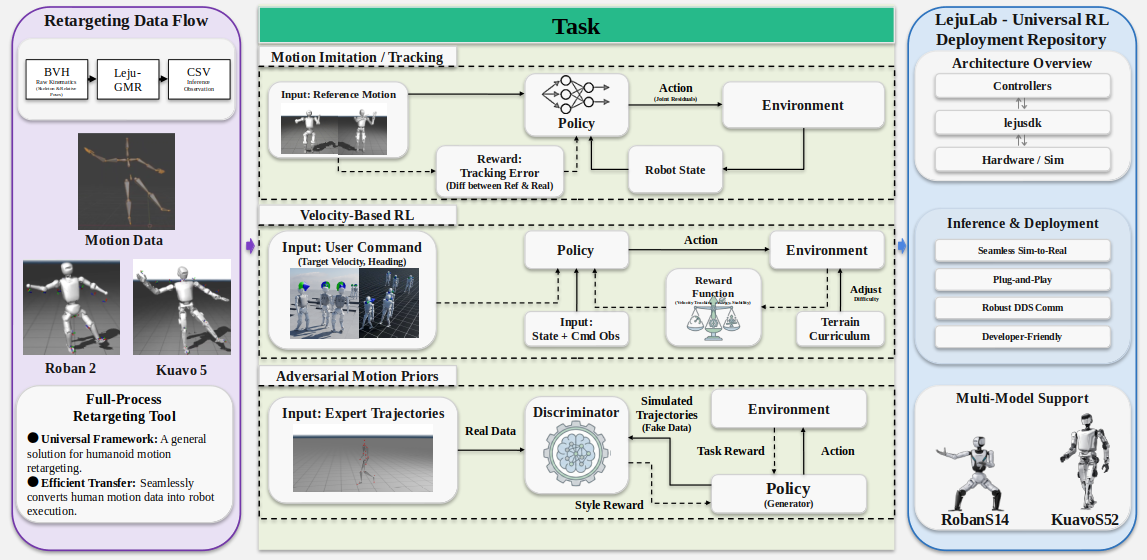
203 次阅读强化学习运动控制框架合集
本文介绍如何使用乐聚的两个开源仓库LejuLab-Train和LejuLab-Deploy,对Roban和Kuavo机器人进行RL训练与部署。
![强化学习运动控制框架合集]()
- 精选
人形机器人创新挑战赛 Kuavo 机器人教程资源汇总
人形机器人教程资源
![人形机器人创新挑战赛 Kuavo 机器人教程资源汇总]() 584 次阅读
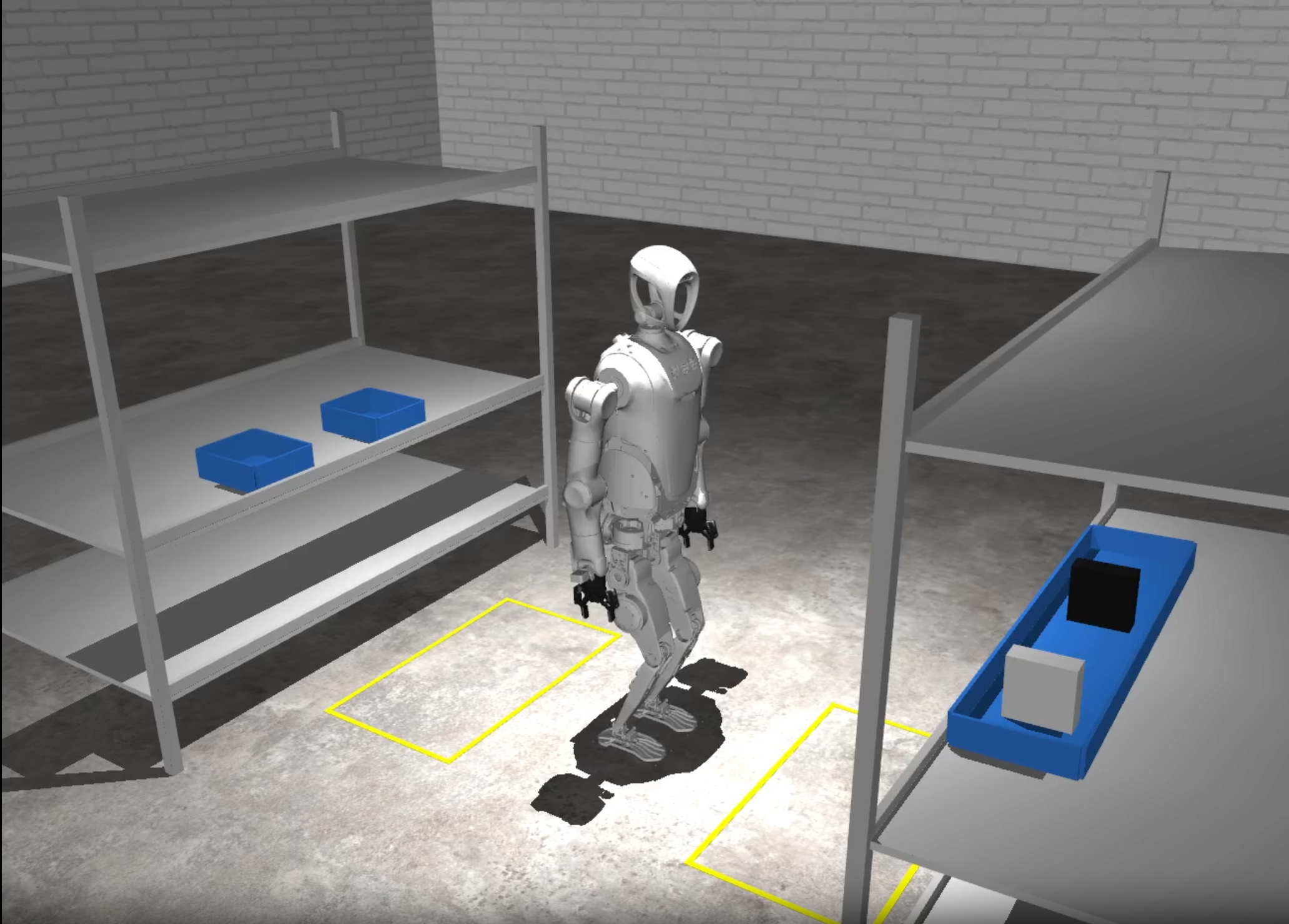
584 次阅读 MuJoCo仿真环境下的场景搭建、数据采集与模型推理
mujuco仿真环境下的场景搭建、数据采集与模型推理
![MuJoCo仿真环境下的场景搭建、数据采集与模型推理]()
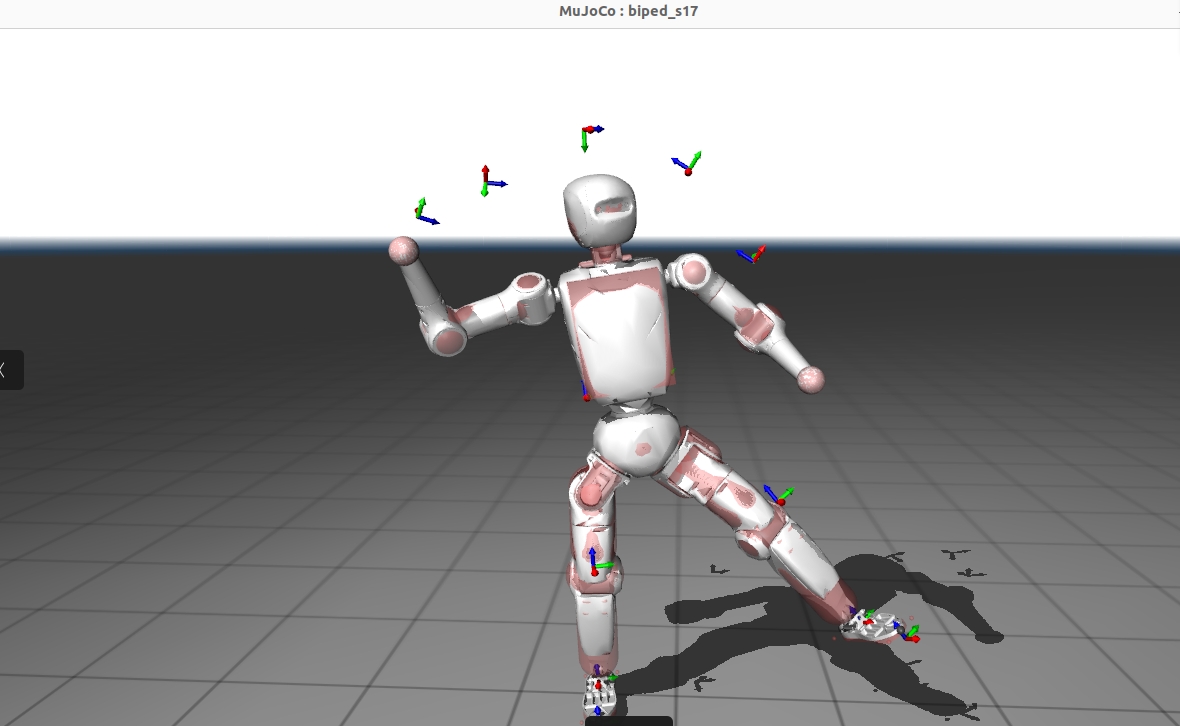
AMP工程迁移手册:基于TienKung-Lab的 Roban 机器人AMP任务实现
基于TienKung-Lab的Roban机器人AMP框架实现
![AMP工程迁移手册:基于TienKung-Lab的 Roban 机器人AMP任务实现]() 120 次阅读
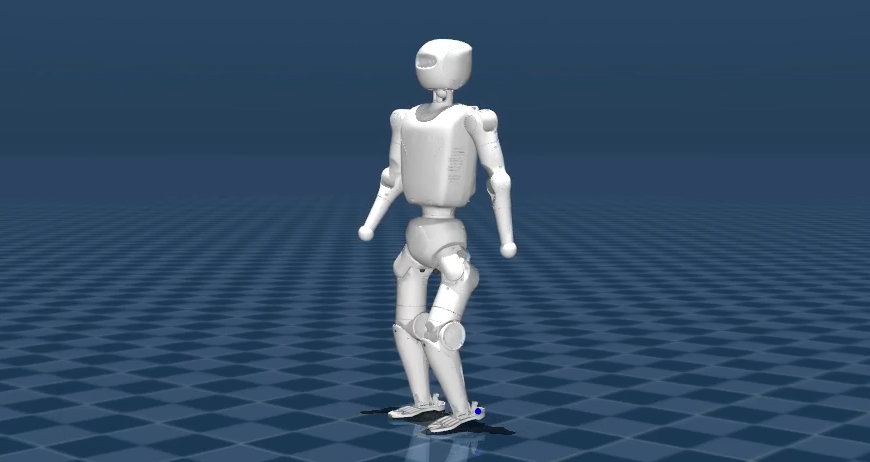
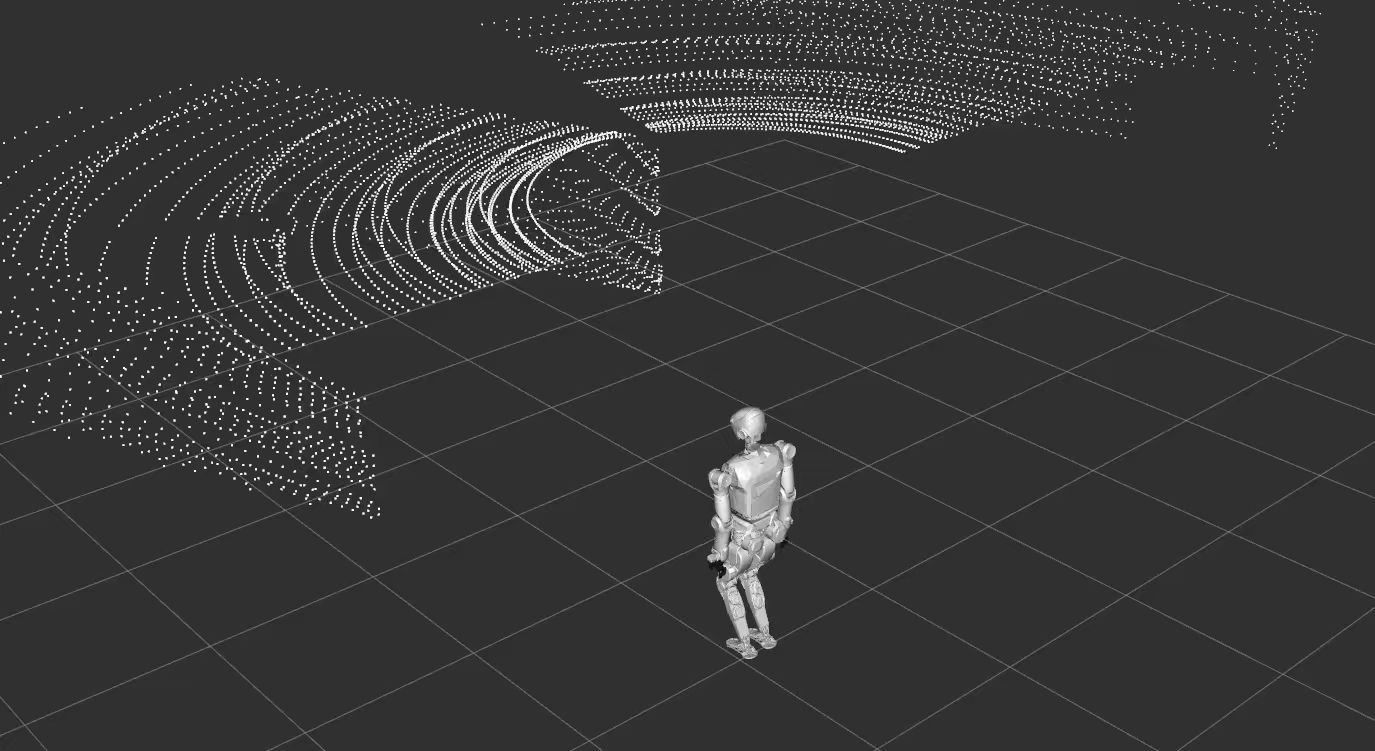
120 次阅读GMR 使用经验分享:从人体动作到机器人轨迹
文章围绕 GMR(General Motion Retargeting)工具,介绍如何将人体动作转换到机器人轨迹,以及GMR工具使用过程中需要注意的问题。
![GMR 使用经验分享:从人体动作到机器人轨迹]()
过滤后的雷达点云信息接收有问题
过滤后的雷达点云信息接收有问题
![过滤后的雷达点云信息接收有问题]() 175 次阅读
175 次阅读LET数据集更新 | 开源高质量全身协同数据!
乐聚机器人全球首发全身协同LET数据集,旨在为模型动态平衡能力研究与非结构化场景落地提供关键基础资源。
![LET数据集更新 | 开源高质量全身协同数据!]()
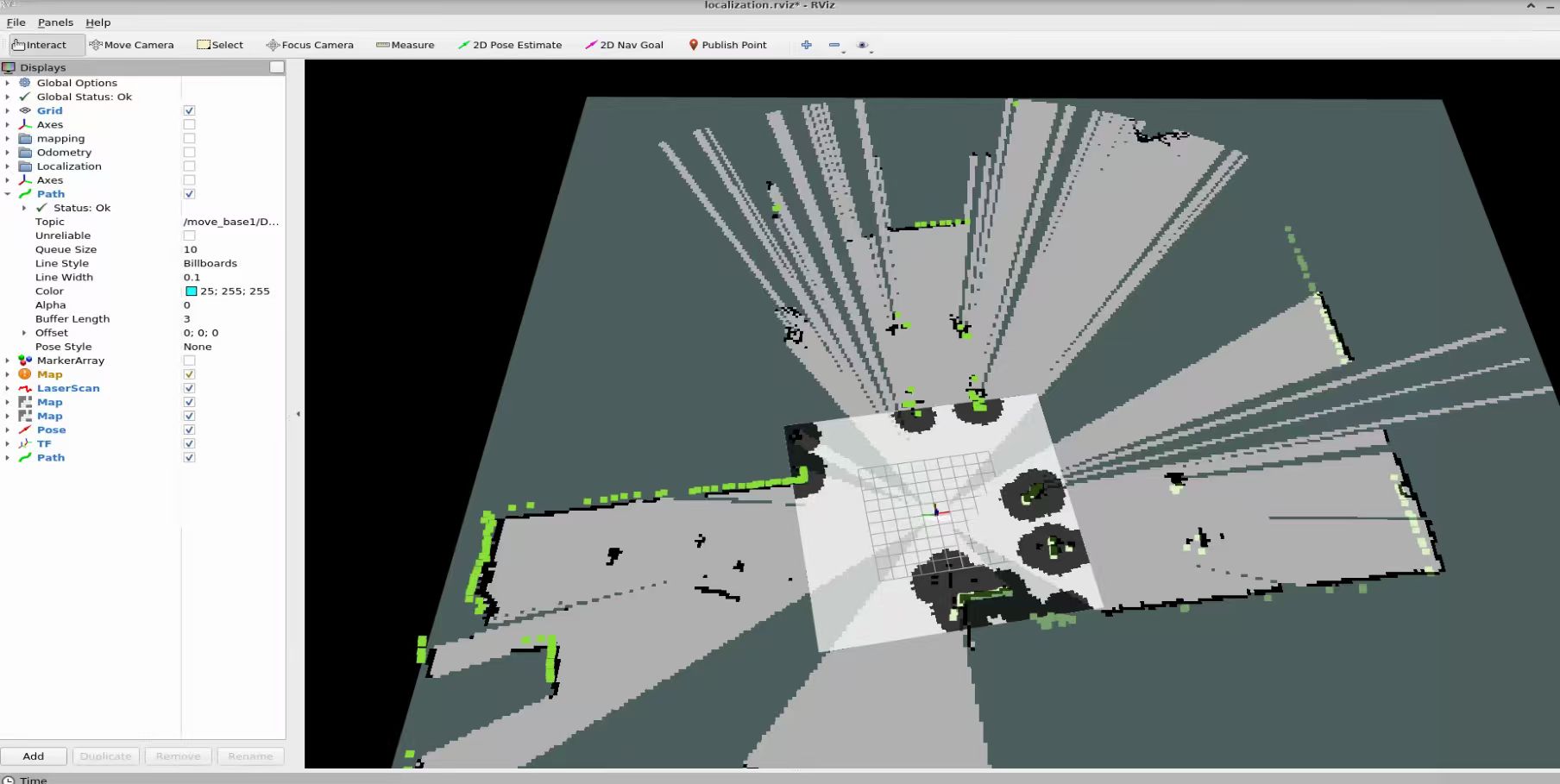
基于kuavo机器人的导航demo
基于kuavo机器人的导航demo
![基于kuavo机器人的导航demo]()
社区动态 | 乐聚牵头!首个国家级具身智能开源数据集社区成立
由工信部指导的唯一国家级开源基金会开放原子开源基金会发起建立,乐聚机器人牵头建设,成立国内首个具身智能开源数据集社区,旨在为具身智能数据基础建设提供制度保障和资源协同。
![社区动态 | 乐聚牵头!首个国家级具身智能开源数据集社区成立]()