数据采集与ACT模型推理效果优化经验分享
数据采集与ACT模型推理效果优化经验分享
![数据采集与ACT模型推理效果优化经验分享]()
活动回顾 | 开放原子开源基金会主办、乐聚承办:开放原子“园区行”——开源数据集专场圆满举办!
由“开放原子开源基金会”主办,“乐聚机器人”等单位承办,开放原子“园区行”——开源数据集专场圆满举办,多方携手共建具身智能数据新生态!
![活动回顾 | 开放原子开源基金会主办、乐聚承办:开放原子“园区行”——开源数据集专场圆满举办!]()
ICRA2026 | REAL-I具身智能挑战赛仿真赛排行榜&真机赛晋级名单公布
ICRA2026官方赛事——REAL-I具身智能挑战赛仿真赛排行榜&真机赛晋级名单现正式揭晓!
![ICRA2026 | REAL-I具身智能挑战赛仿真赛排行榜&真机赛晋级名单公布]()
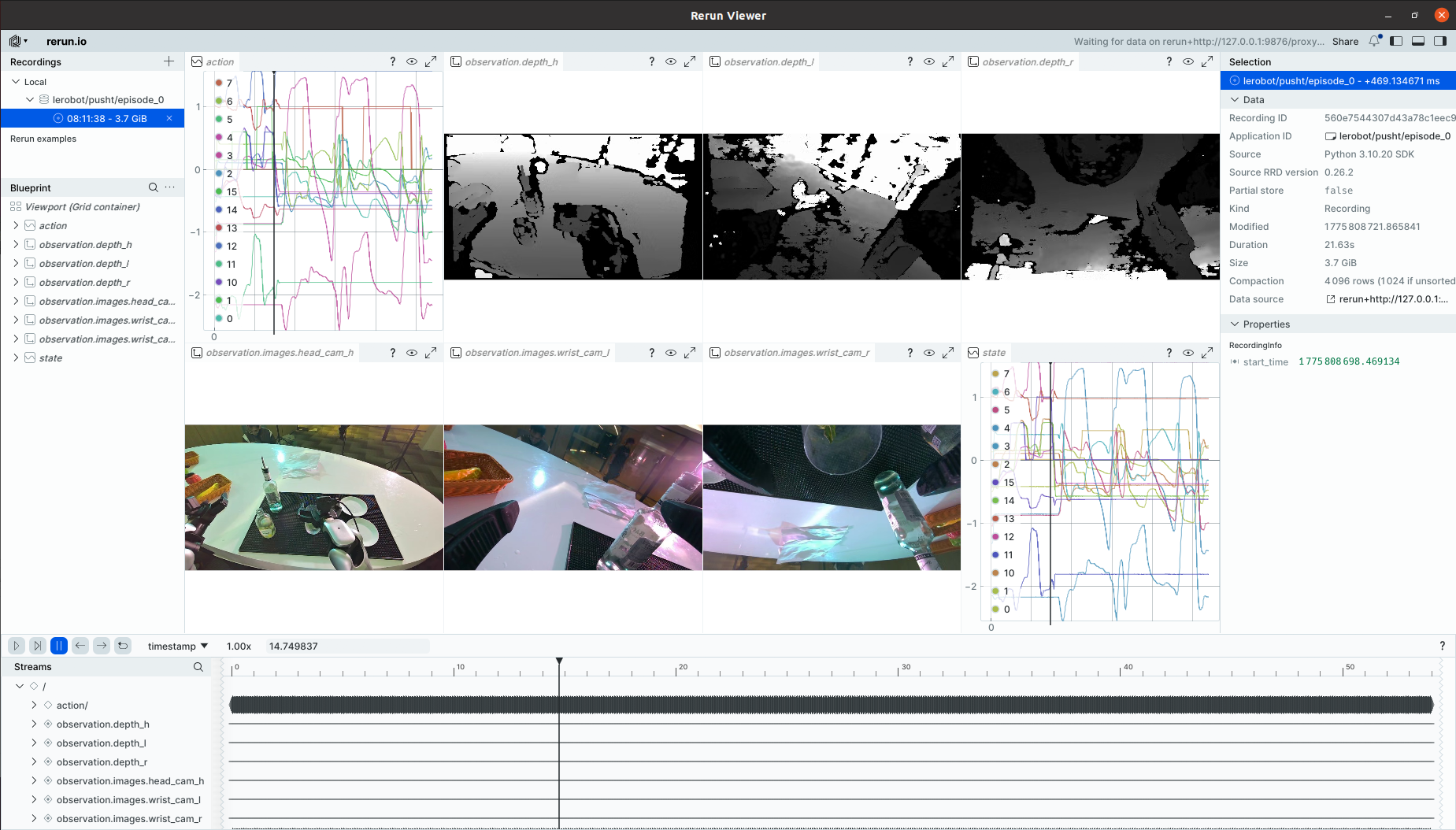
具身智能数据处理与模型训练框架
本文详细介绍了面向全尺寸人形机器人的具身智能数据处理与模型训练框架,基于 LeRobot 构建,完整覆盖从环境配置、数据采集、格式转换、模仿学习训练到真机部署推理的全流程。以乐聚 Kuavo 4pro、Kuavo 5/5W 机器人为硬件平台,搭配 VR 遥操作与乐聚数采平台完成真实场景数据采集,支持将 ROSbag 数据转换为标准训练格式,并通过 ACT、Diffusion 等策略进行端到端模仿学习训练。文中实现了两大典型科研场景:莫吉托酒调制(长程复杂任务拆解与序列执行能力)与果蔬分拣(目标识别、分类与泛化操作能力),并提供详细硬件清单、软件环境、部署参数及推理调优方案。整套框架可直接用于真机实验、复现演示与科研开发,为具身智能与机器人学习提供一站式工程化实践方案。
![具身智能数据处理与模型训练框架]()
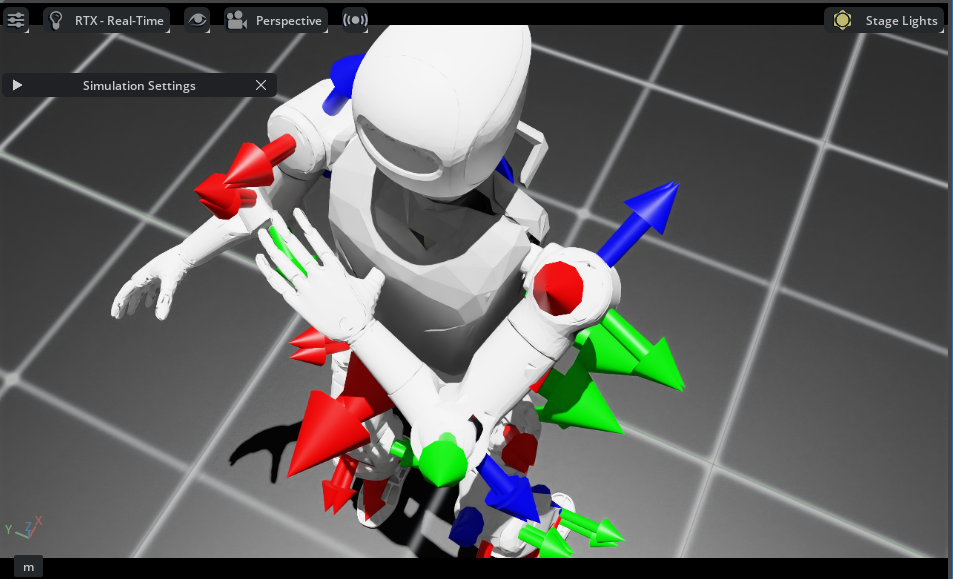
模型实机部署肢体碰撞问题优化经验分享
本文主要介绍,舞蹈模型部署实机后,手部和身体碰撞问题。分别从训练端和部署端进行优化的方法。
![模型实机部署肢体碰撞问题优化经验分享]()
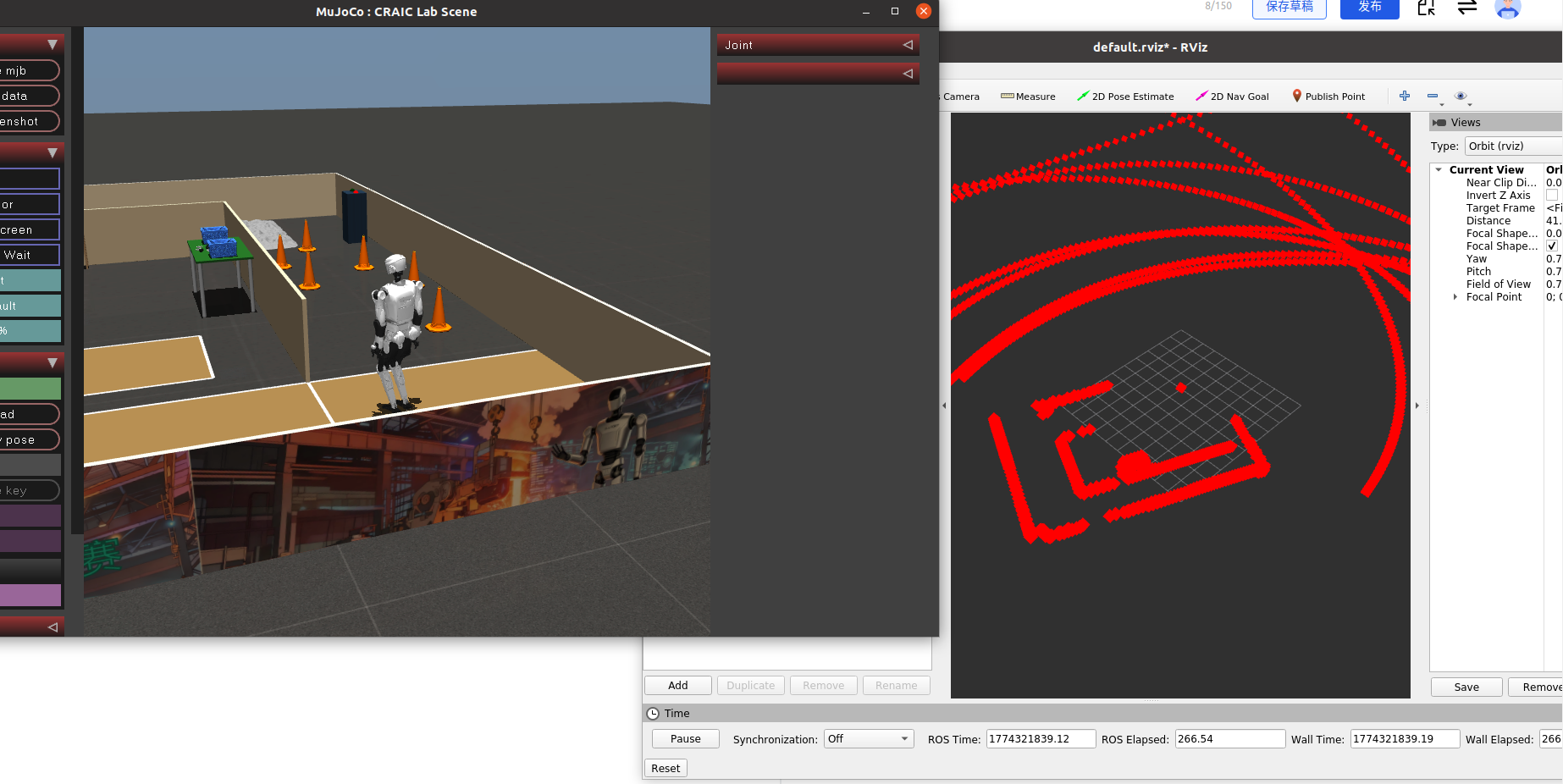
雷达识别不到障碍
识别不到路障
![雷达识别不到障碍]() 260 次阅读
260 次阅读- 精选
赛事答疑发帖指引
第二十八届 CRAIC 中国机器人及人工智能大赛机器人任务挑战赛 - 人形机器人创新挑战赛 - 赛事答疑发帖指引
![赛事答疑发帖指引]() 340 次阅读
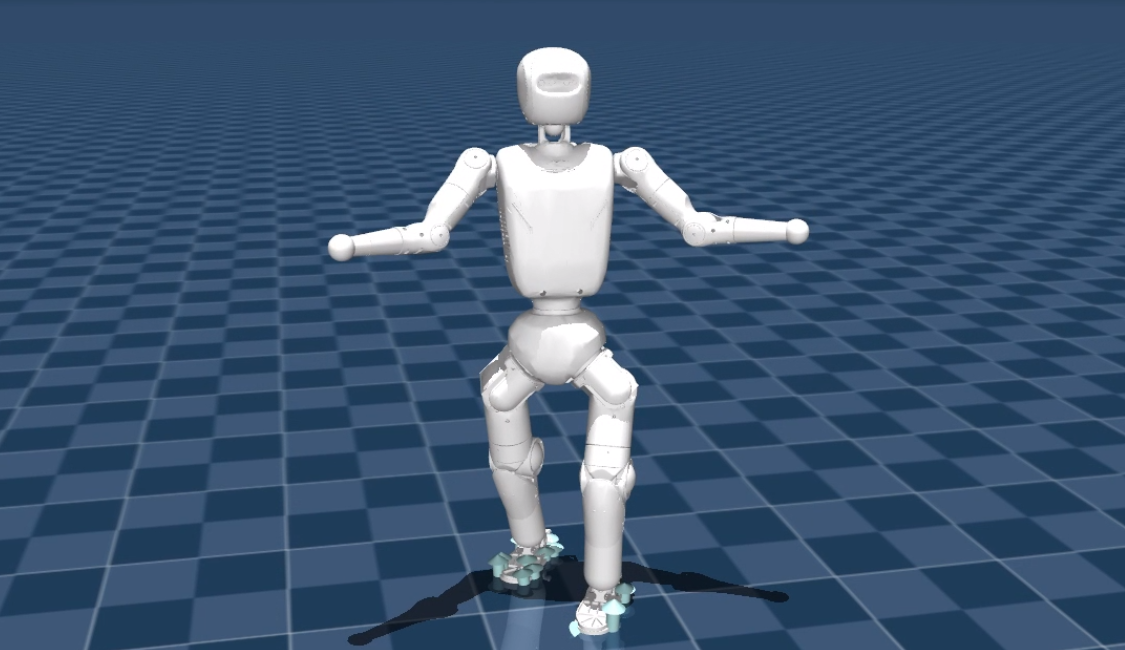
340 次阅读 基于roban_whole_body_tracking的强化学习实践经验分享
本文围绕人形机器人的强化学习与动作跟踪(Mimic)技术,分享了相关理论学习资源与工程实操经验。文章以 leju-gmr 和 roban_whole_body_tracking 框架为例,详细梳理了从动捕数据处理到模型训练与实机部署的完整工作流。针对训练过程中的常见痛点,本文重点剖析了奖励函数的优化设计(如末端跟踪的选择、引入质心跟踪以改善抬腿与平衡问题)、域随机化的应用策略,以及 kp、kd 与 ACTION_SCALE 等核心训练参数的计算与调优方法,为提升模型 sim2real 部署的稳定性与流畅度提供了详实的实战参考。
![基于roban_whole_body_tracking的强化学习实践经验分享]() 367 次阅读
367 次阅读第一届具身智能操作任务挑战赛&创业启航营仿真赛结果通告
经组委会综合评审,最终确定32支队伍成功晋级真机赛阶段,晋级名单已通过乐聚OpenLET社区及赛事QQ群公布。
![第一届具身智能操作任务挑战赛&创业启航营仿真赛结果通告]()
第一届具身智能操作任务挑战赛仿真赛排行榜&晋级名单公布
第一届具身智能操作任务挑战赛仿真赛排行榜及晋级名单现已正式揭晓!
![第一届具身智能操作任务挑战赛仿真赛排行榜&晋级名单公布]()